Welcome to my Portfolio
MECHANICAL ENGINEERING · PRODUCT DESIGN · ROBOTICS · PHYSICAL AI · UNIV. OF PENNSYLVANIA
SEC. A / PROJECTS
Projects & Research
Tap any card to jump to the full project.
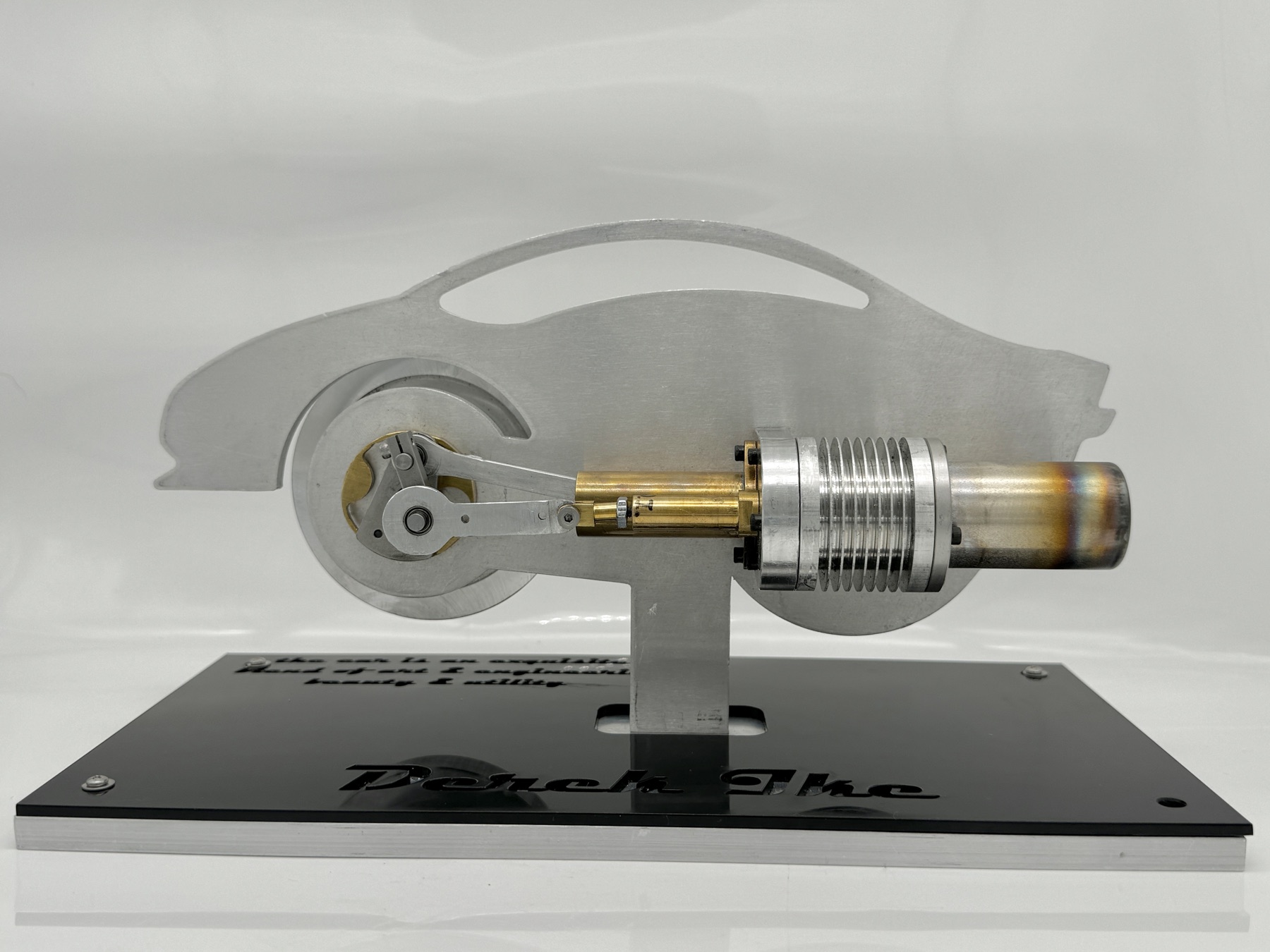 Stirling Engine
CAD · Precision Machining
Stirling Engine
CAD · Precision Machining
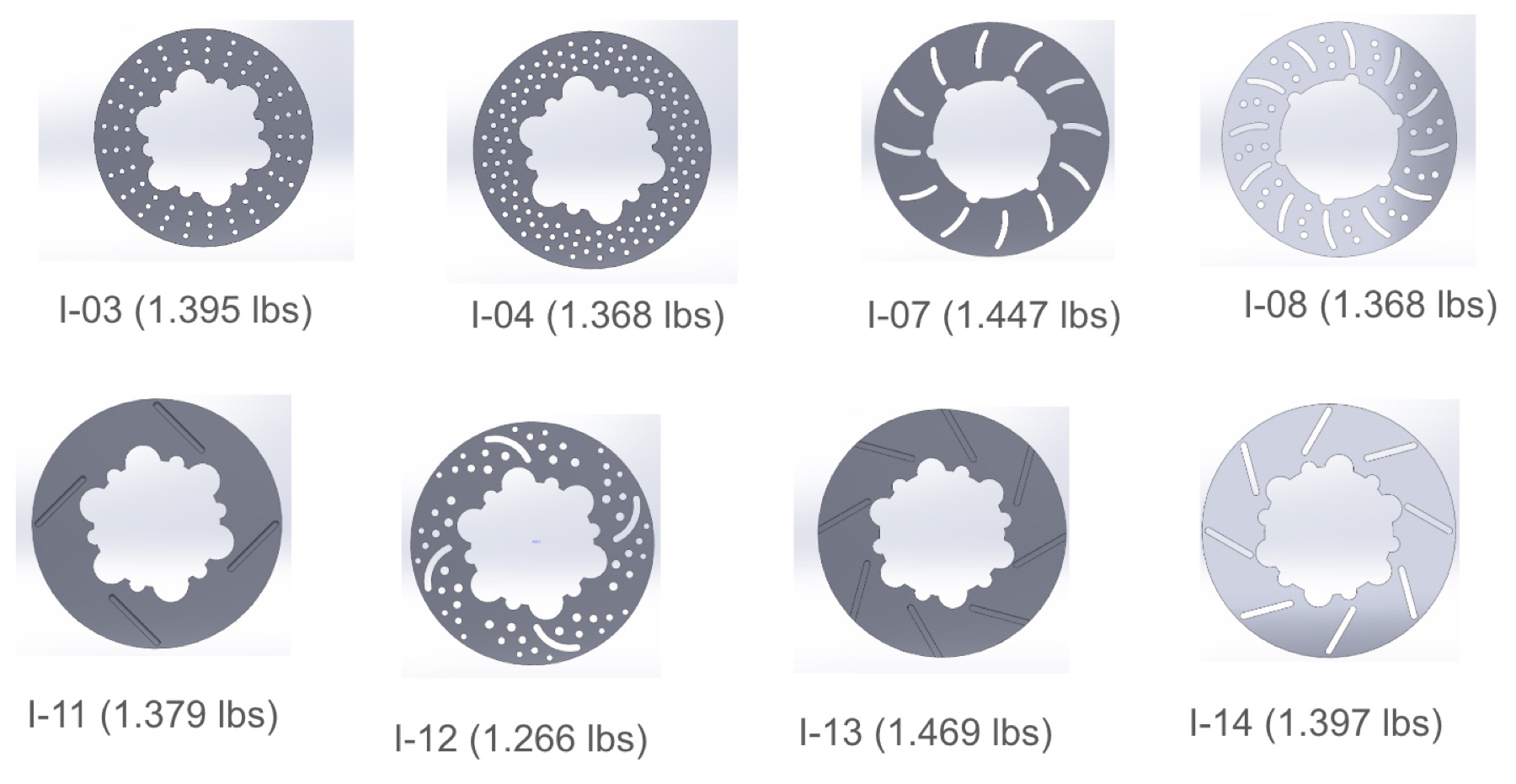
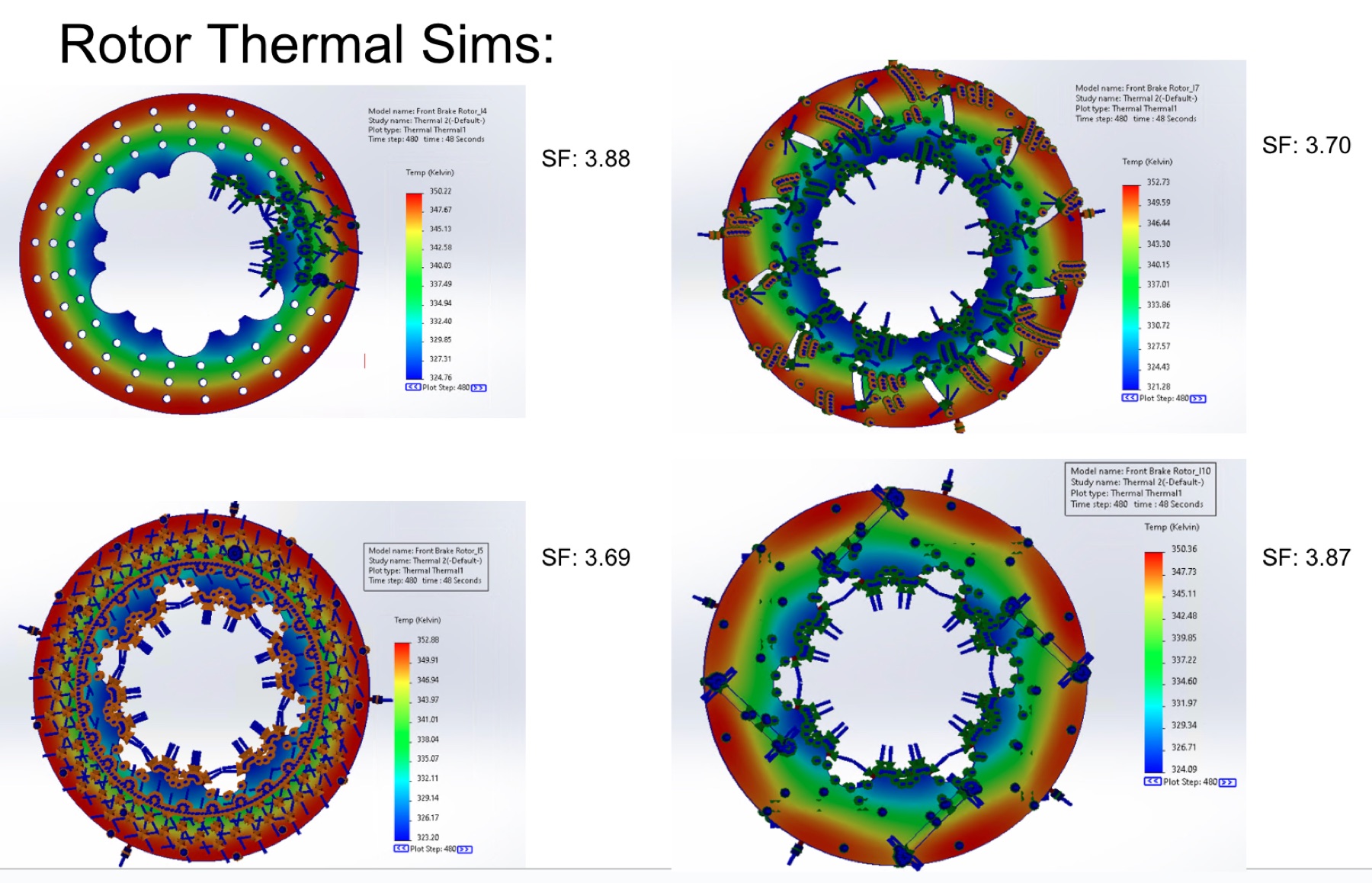 Brakes: Penn Electric Racing (FSAE)
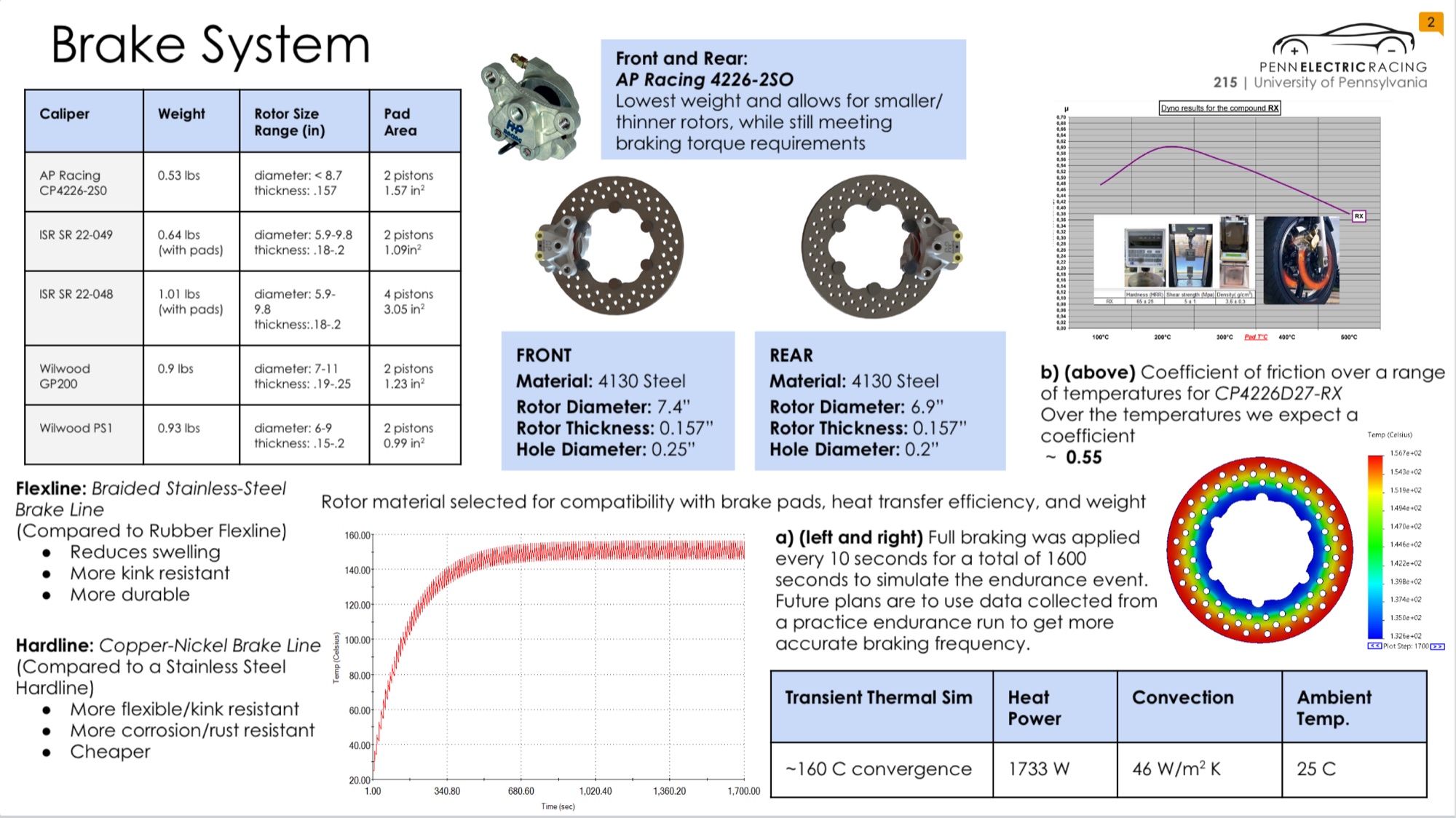
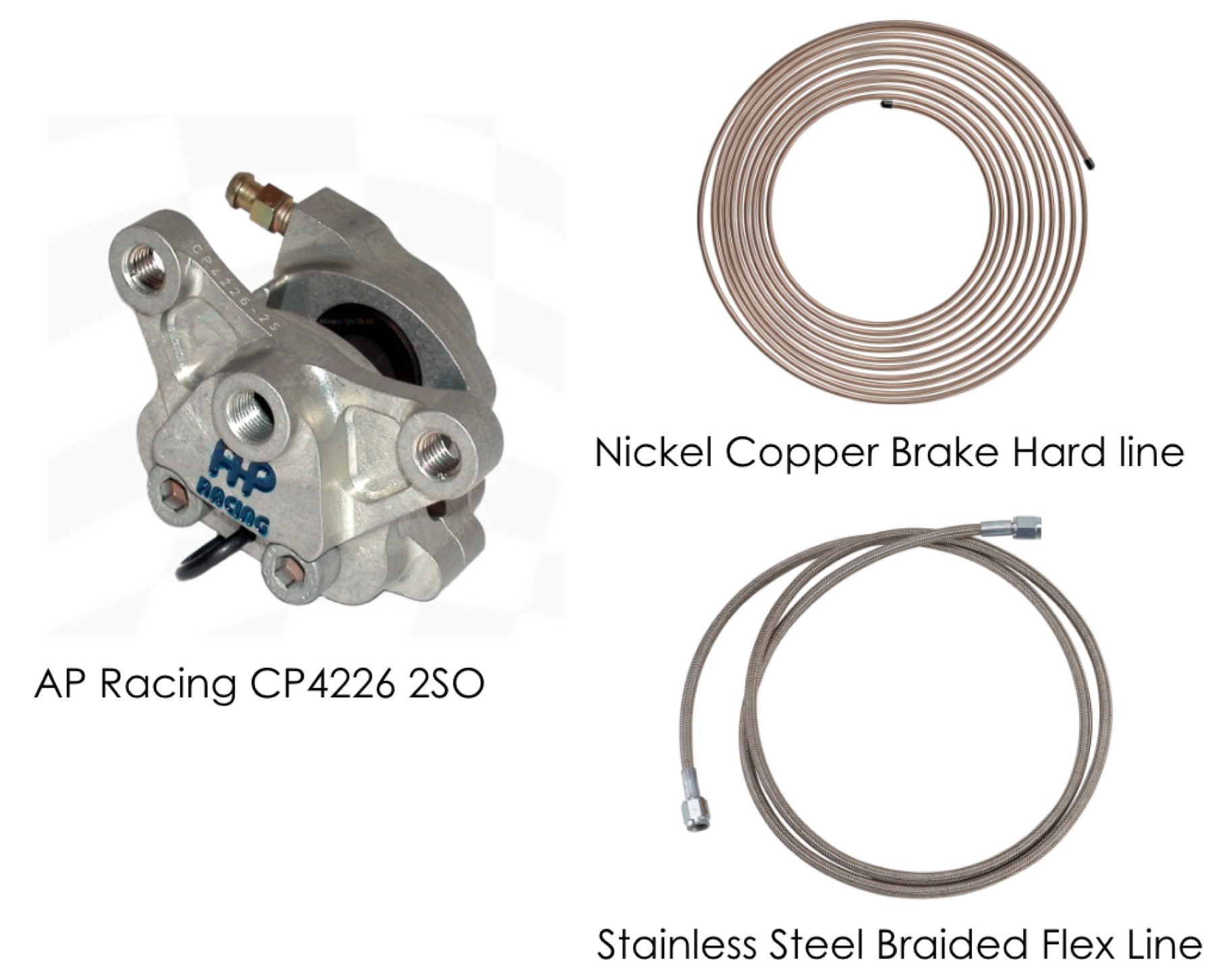
Mechanical Engineer · Brake System
Brakes: Penn Electric Racing (FSAE)
Mechanical Engineer · Brake System
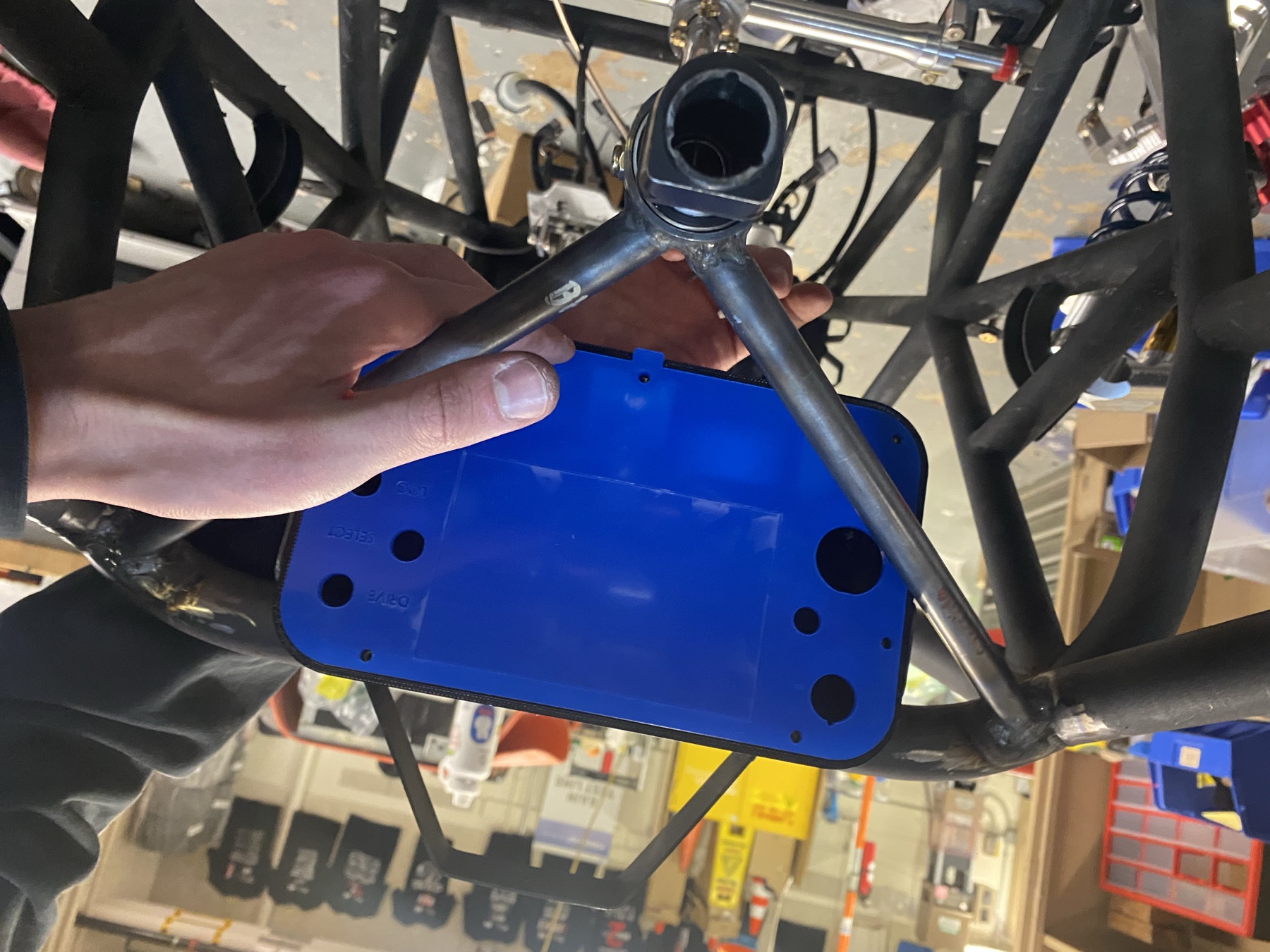
 Dashboard: Penn Electric Racing (FSAE)
Mechanical Engineer · Driver Dashboard
Dashboard: Penn Electric Racing (FSAE)
Mechanical Engineer · Driver Dashboard
 Project Iapyx
Robotics Research · Embodied AI
Project Iapyx
Robotics Research · Embodied AI
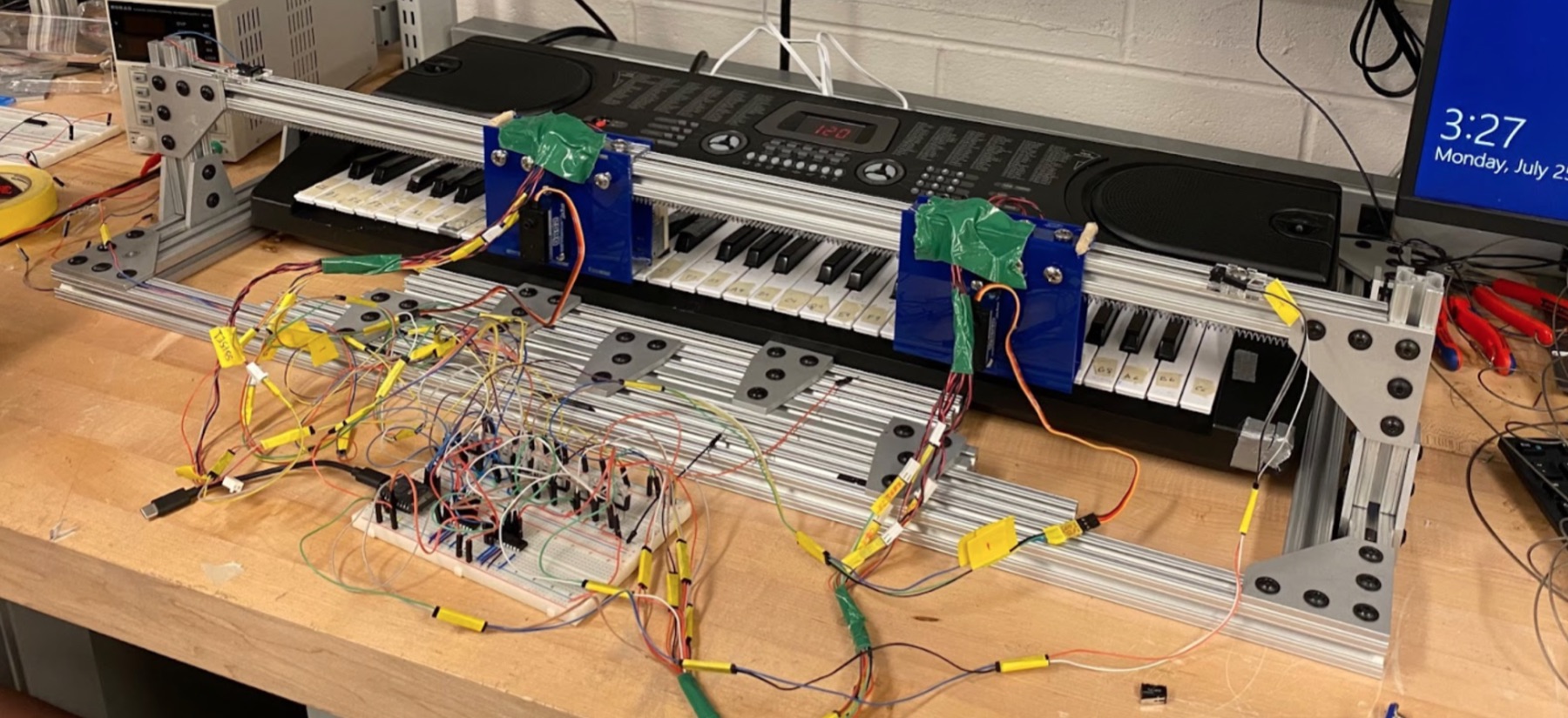
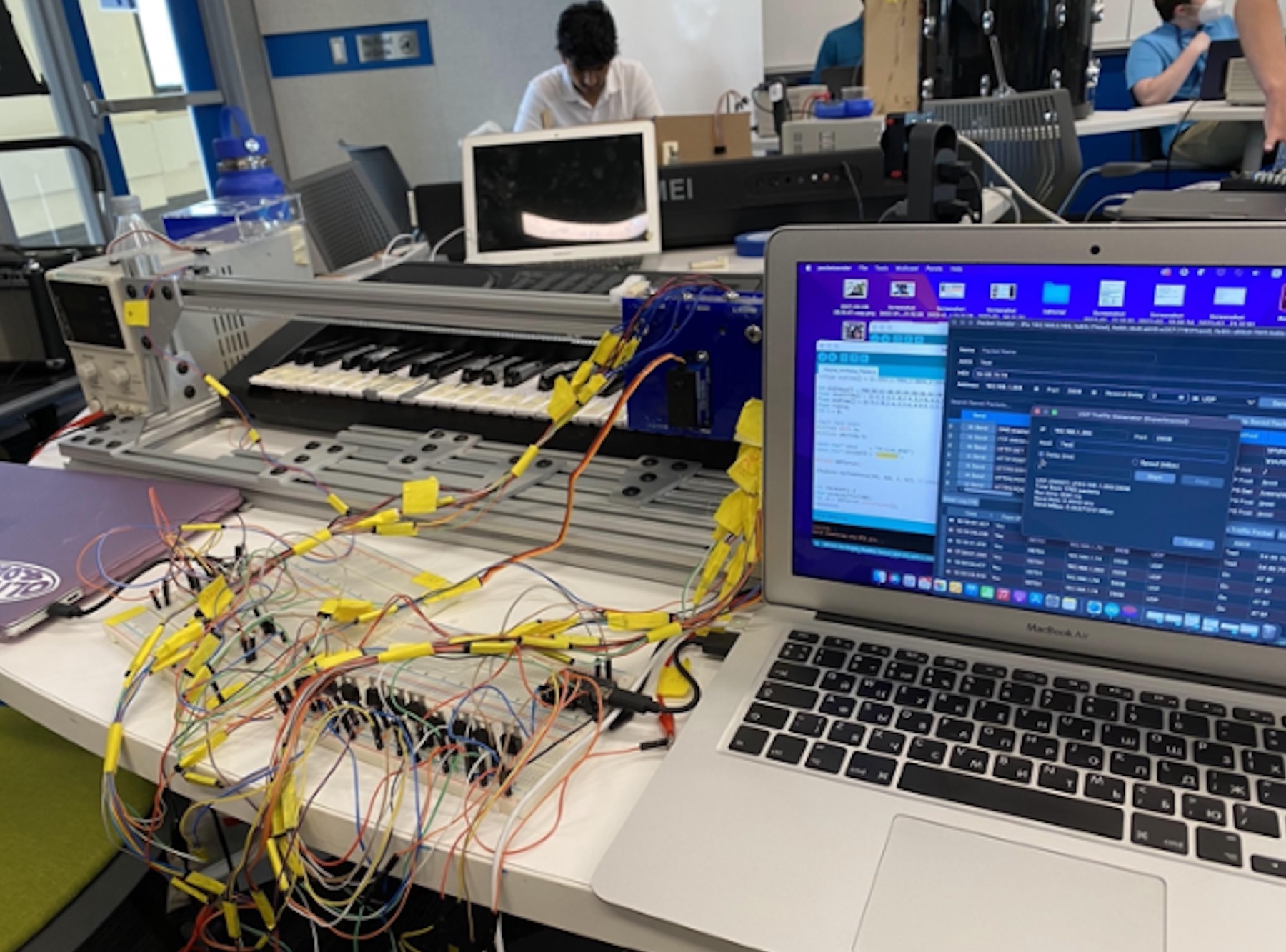
 The Robotic Pianist
Robotics · Control Systems
The Robotic Pianist
Robotics · Control Systems
 Thesio: The Prediction Engine
Predictive Networking · AI-Native App · Consumer
Thesio: The Prediction Engine
Predictive Networking · AI-Native App · Consumer
 Wake & Drag: Cd–Re Characterization via CFD
CFD · Fluid Dynamics
Wake & Drag: Cd–Re Characterization via CFD
CFD · Fluid Dynamics
 Vertical Axis Wind Turbine
Design · Fabrication · Analysis
Vertical Axis Wind Turbine
Design · Fabrication · Analysis
 Hydrostatic Thrust Tower
Fluid Mechanics · Statics · Parametric Design
Hydrostatic Thrust Tower
Fluid Mechanics · Statics · Parametric Design
 Water-Butane Rocket
Flight Modeling · Aerodynamics
Water-Butane Rocket
Flight Modeling · Aerodynamics
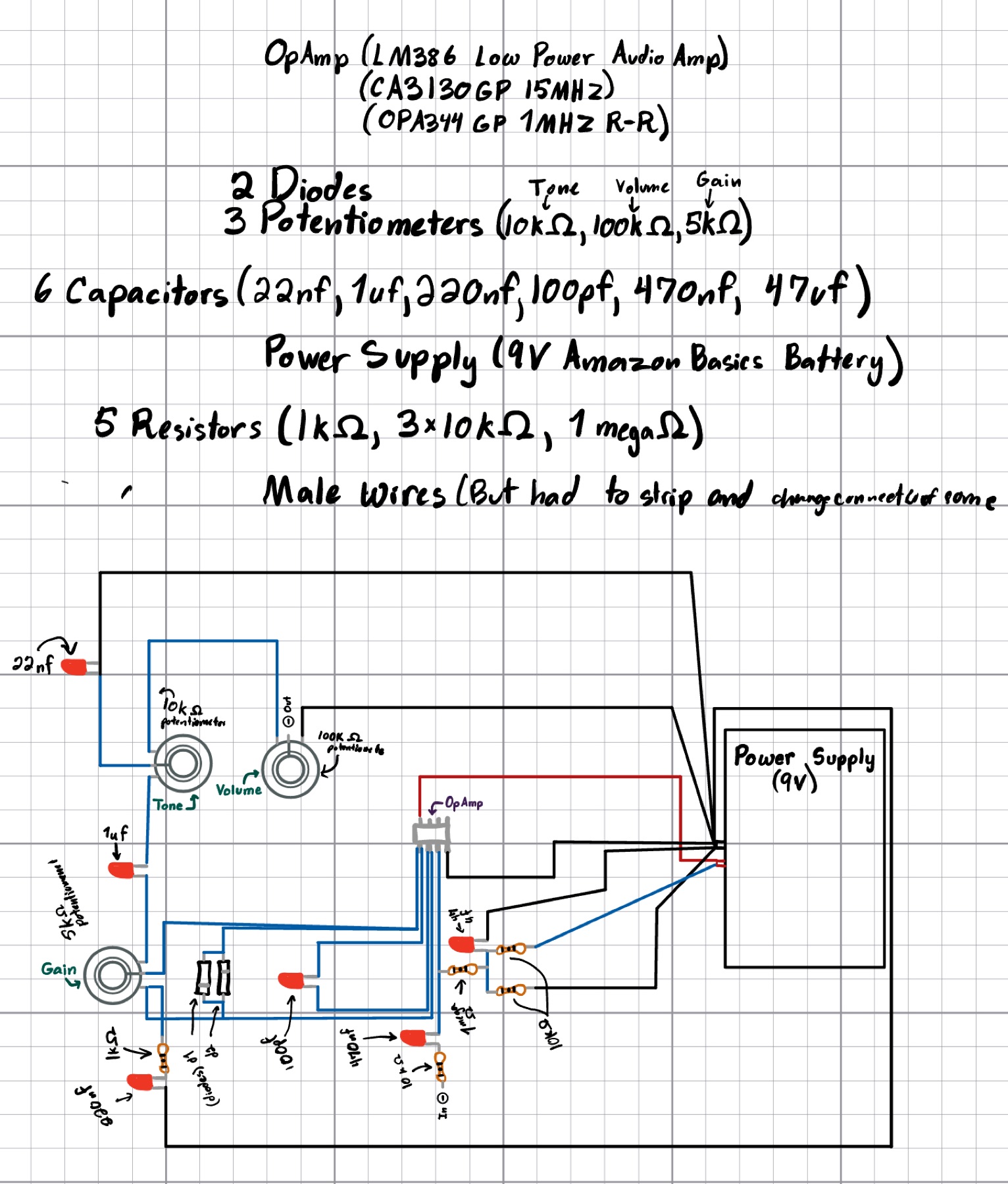
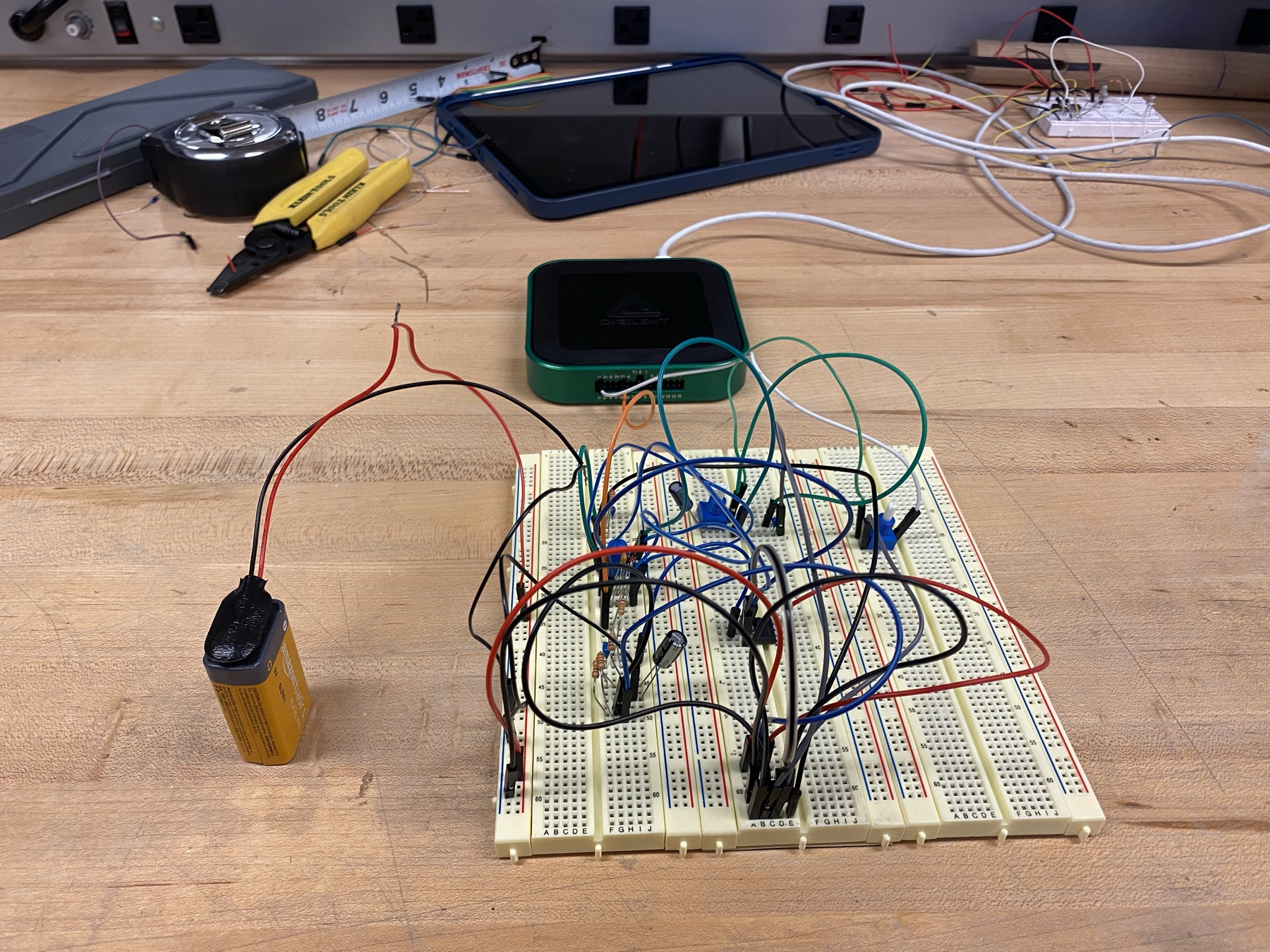
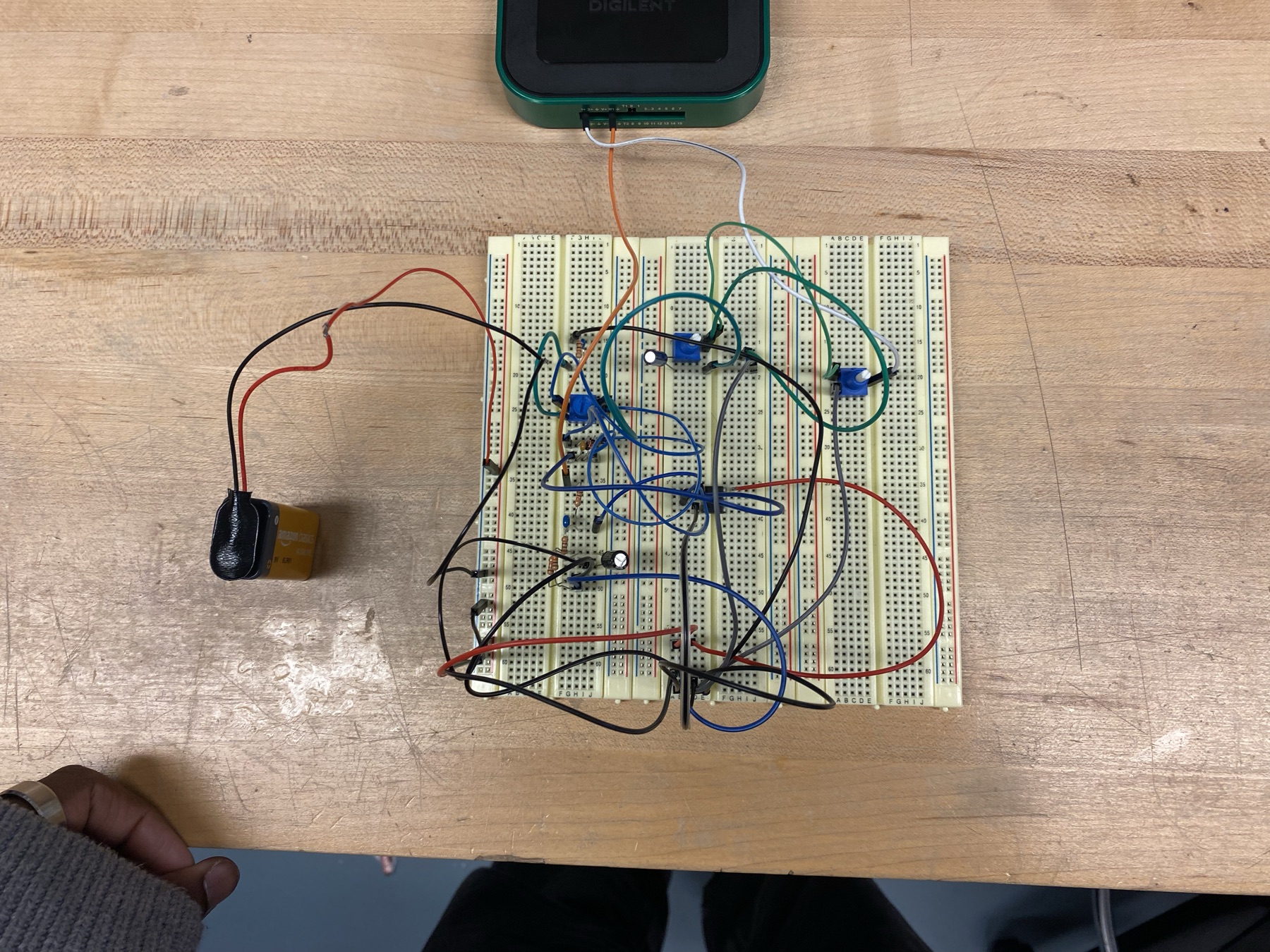
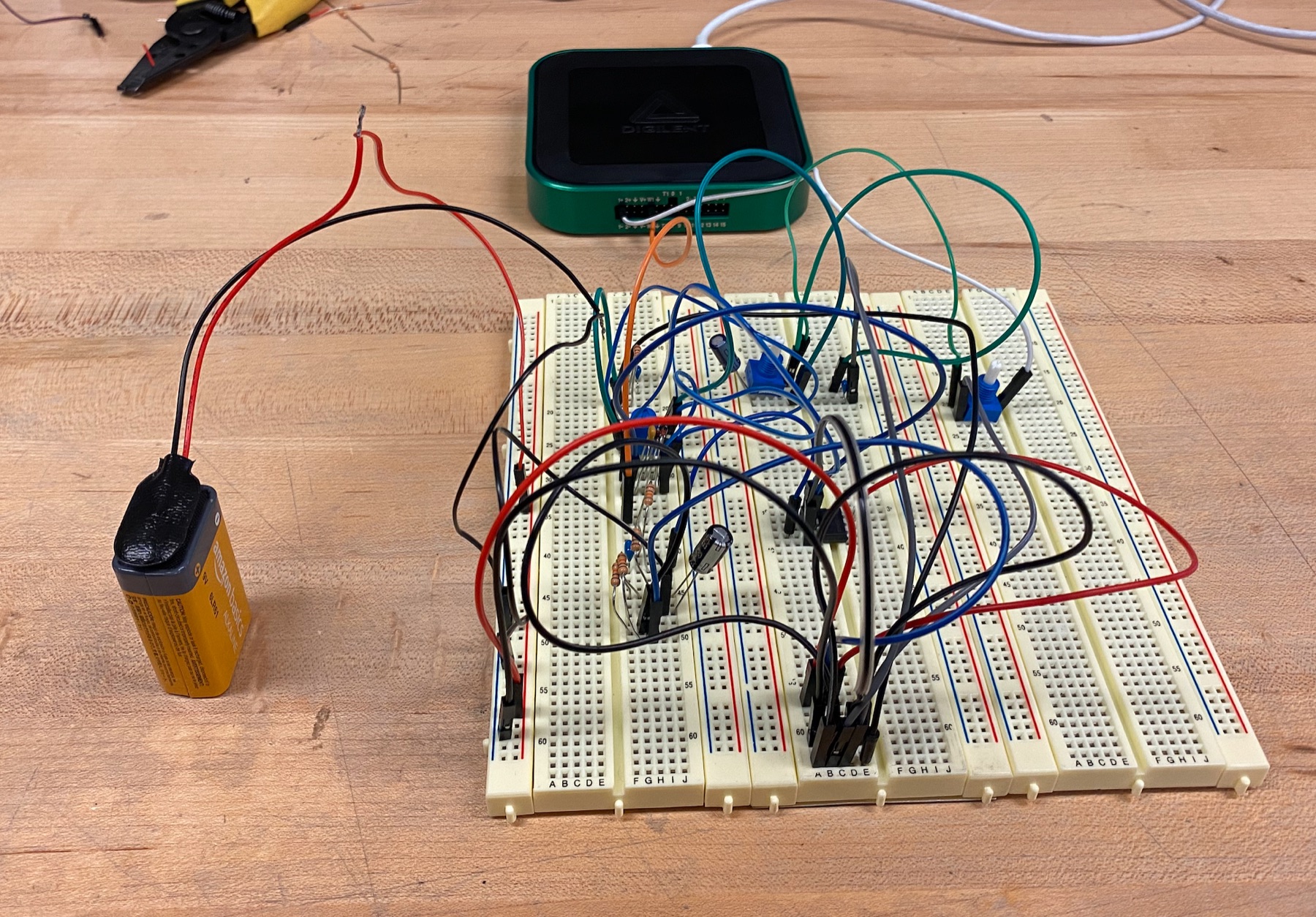
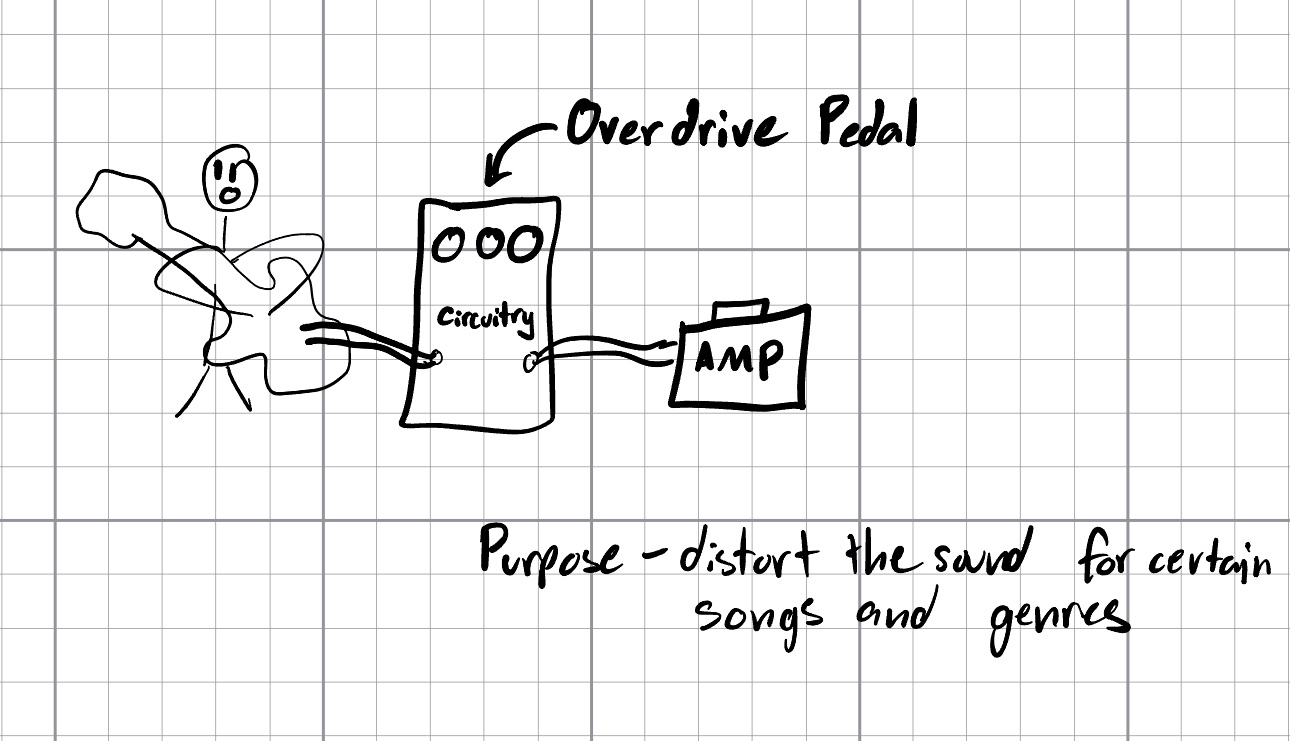
 Overdrive Pedal
Electrical Prototype
Overdrive Pedal
Electrical Prototype
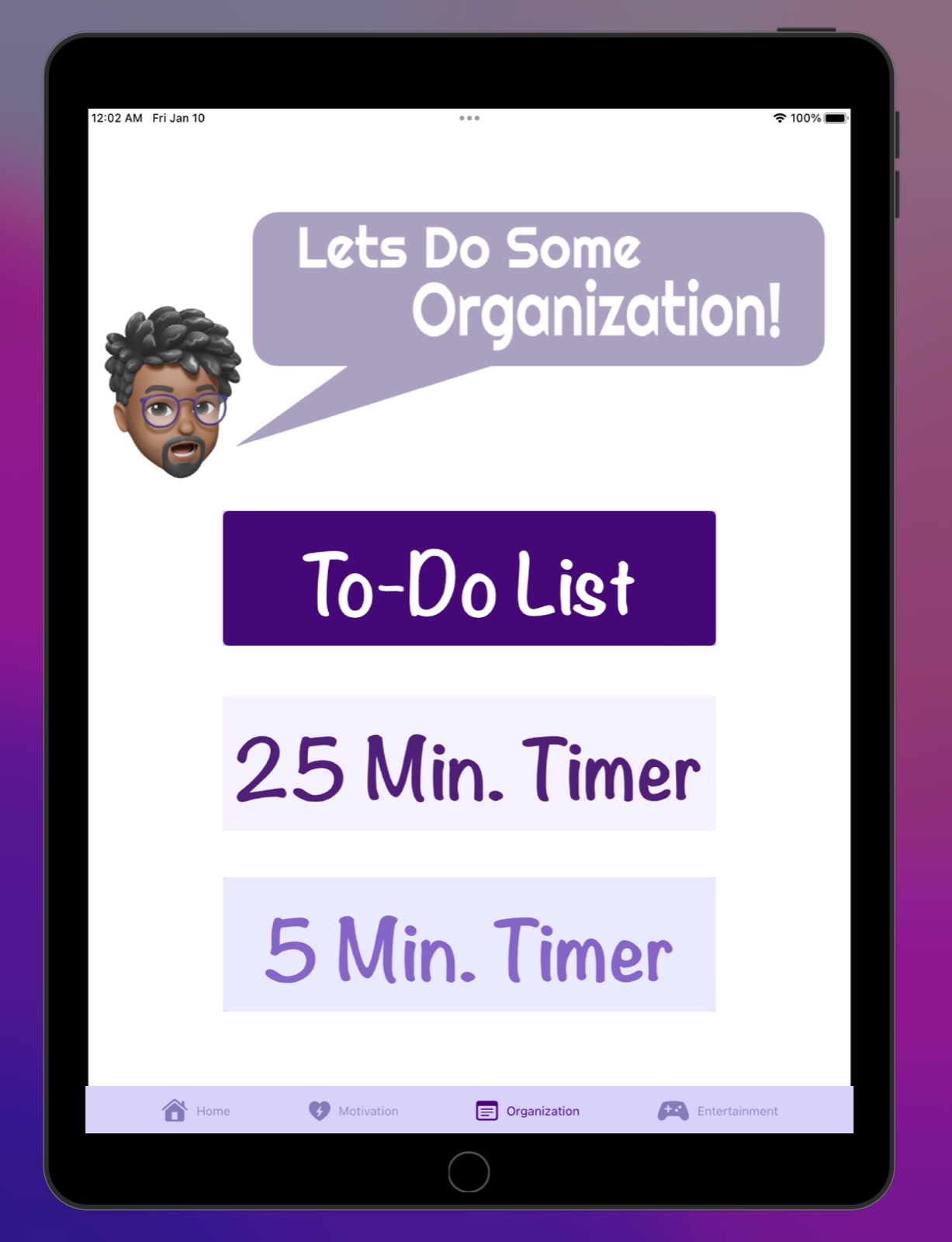
 Huey: The Academic Assistant
App Development · Swift
Huey: The Academic Assistant
App Development · Swift
PROJ. 01
Stirling Engine

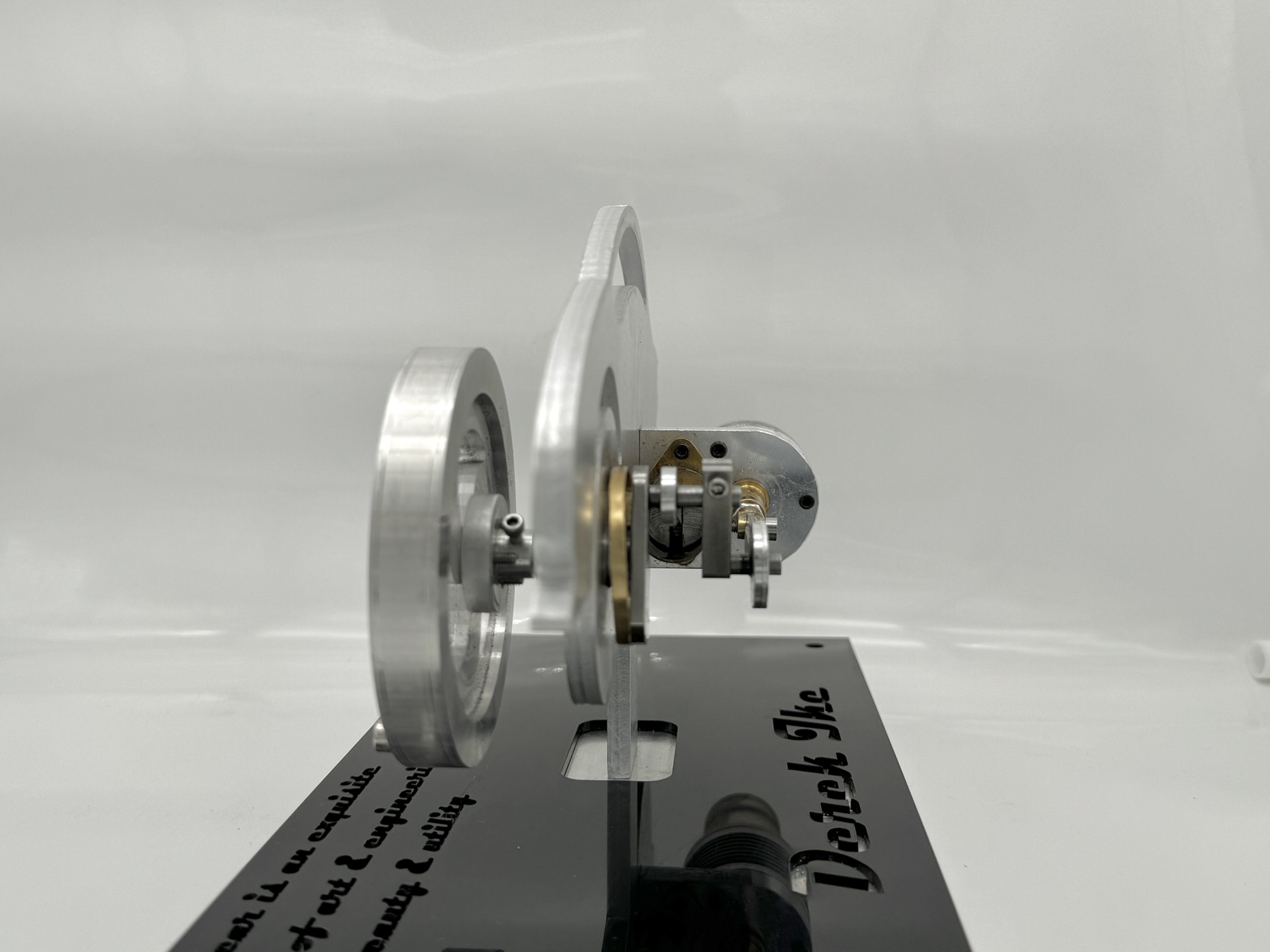
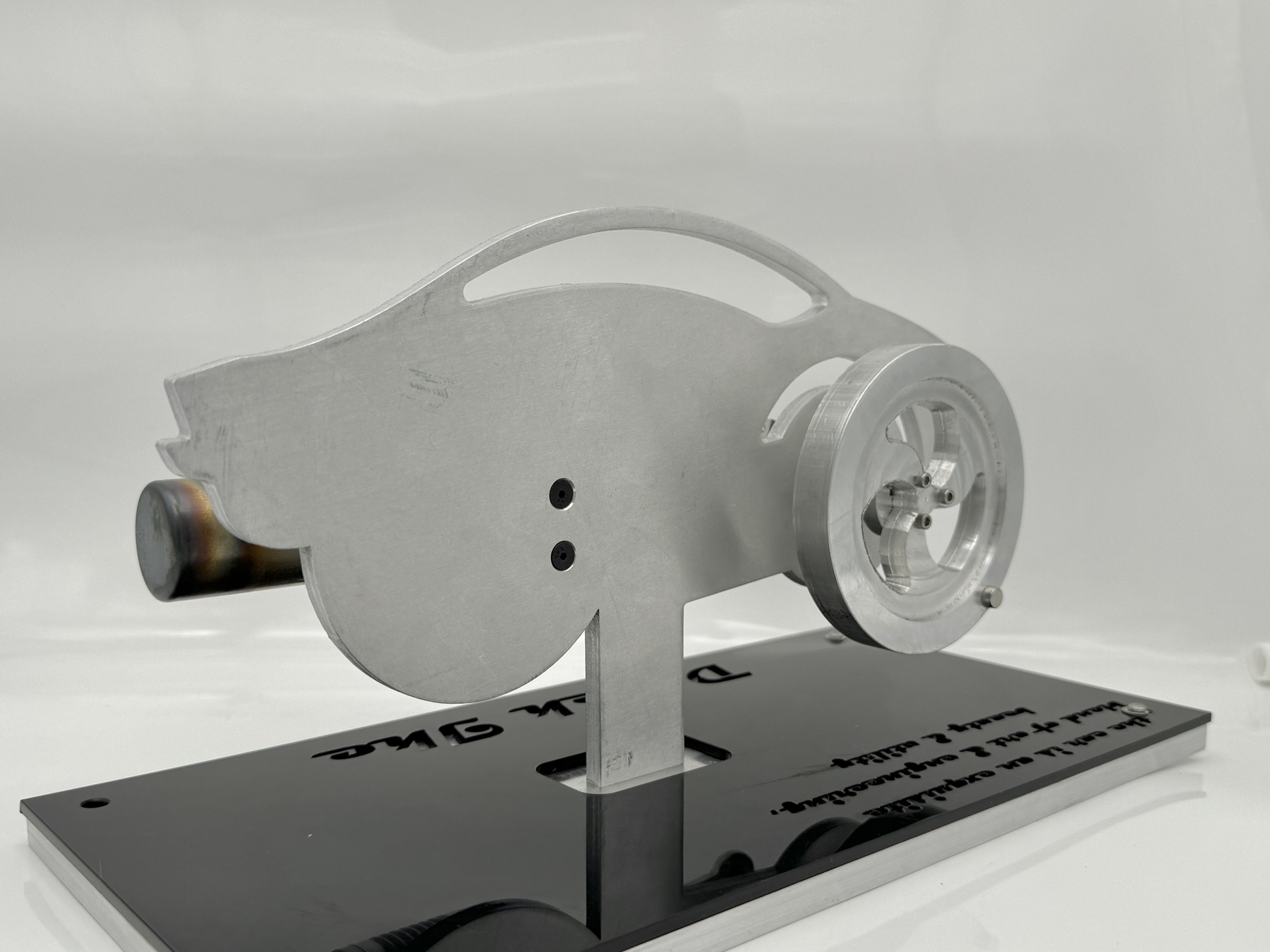
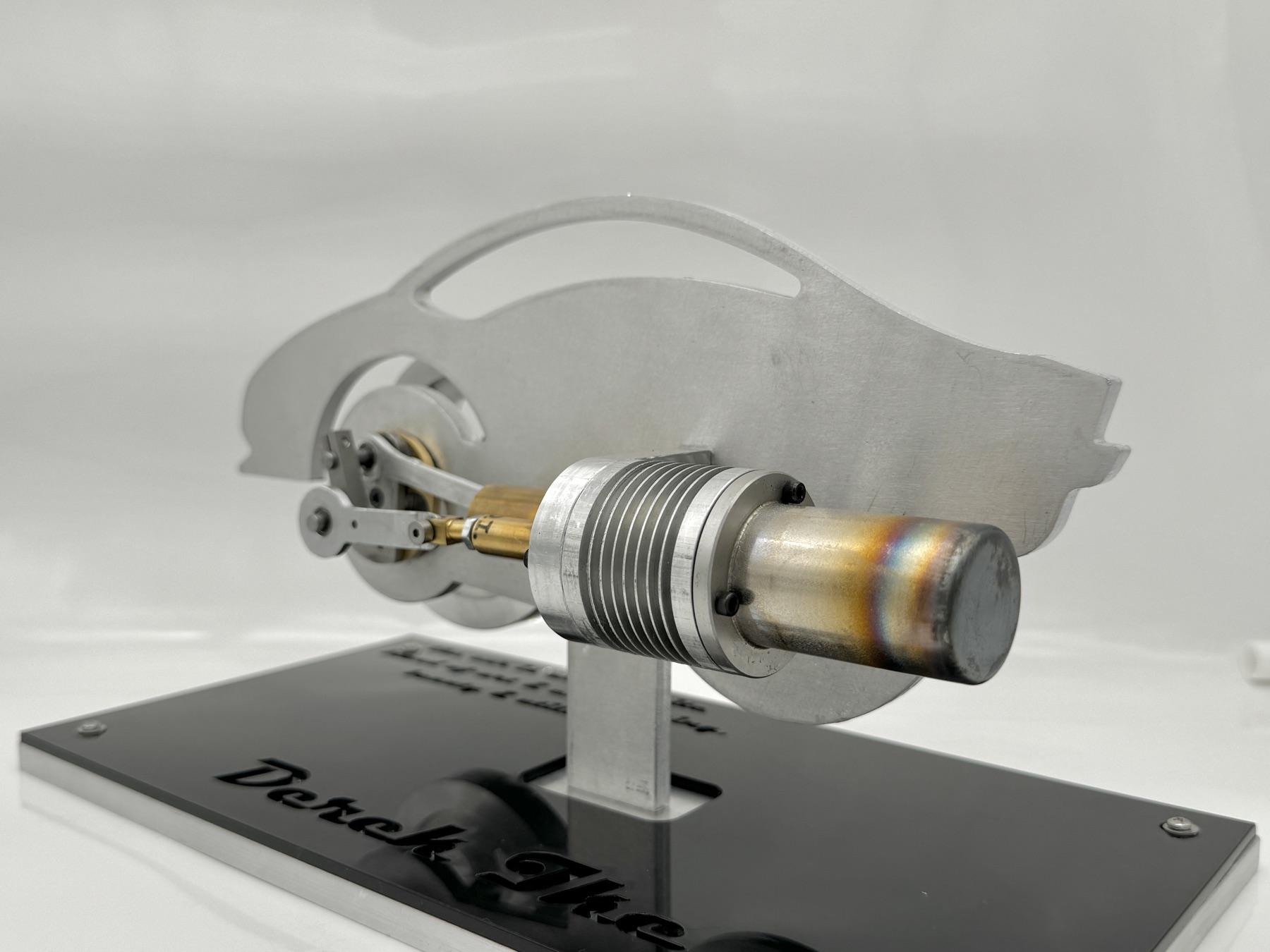
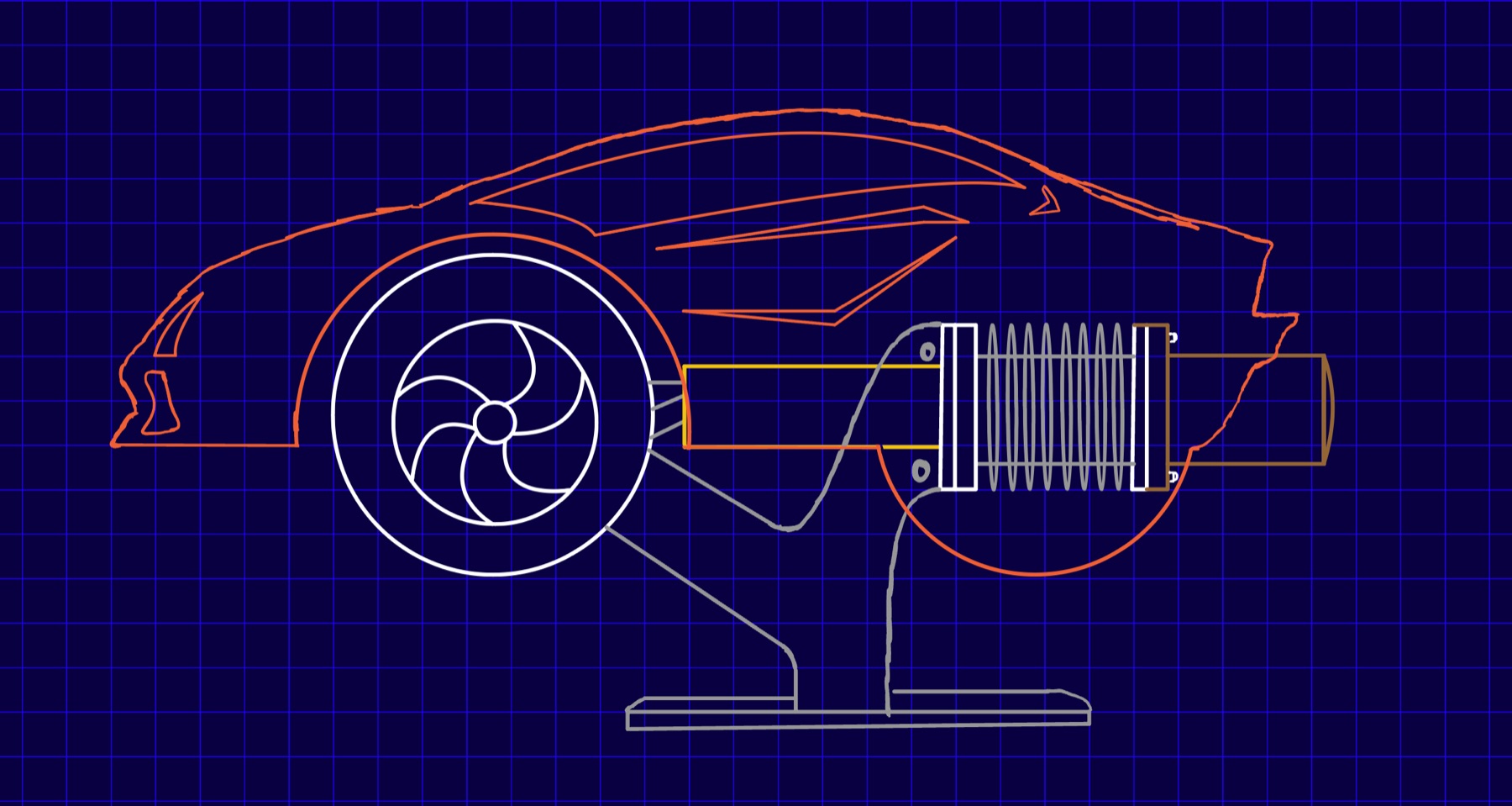
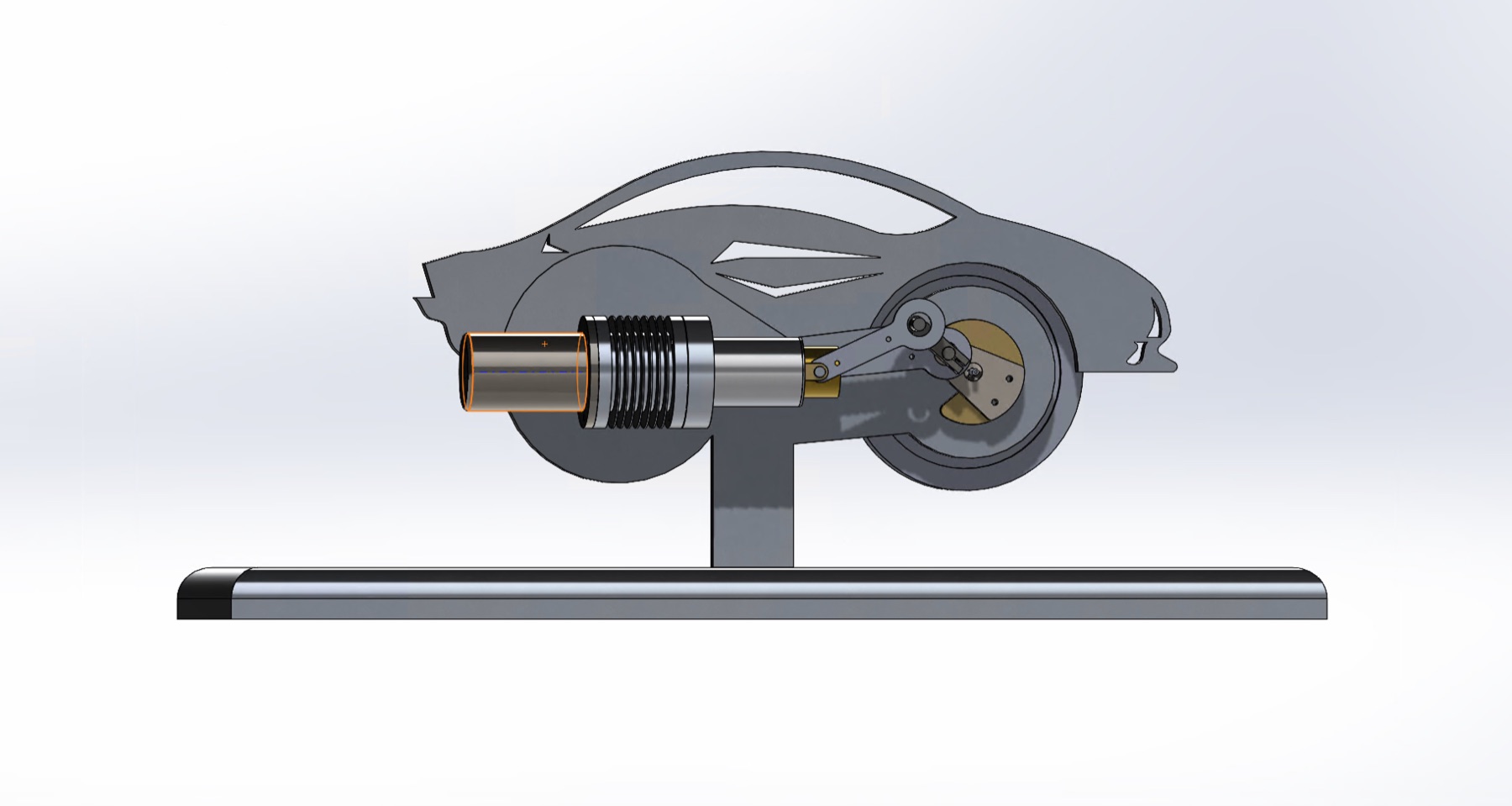

MOTION · MACHINING & RUNNING · VIDEOS PLAY AS THEY ENTER VIEW
PROJ. 02
Brakes: Penn Electric Racing (FSAE)







PROJ. 03
Dashboard: Penn Electric Racing (FSAE)





PROJ. 04
Project Iapyx
FIVE-FINGER HAND ACTUATOR · LIVE 3D (view only)
PREDICTIVE ADOPTION MODELING
I model adoption with Bass diffusion, calibrating innovation and imitation coefficients segment-by-segment against mature, already-diffusing S-curves (surgical robots, warehouse AMRs, robotaxis), and gating humanoid adoption on the cost and reliability thresholds that actually trigger word-of-mouth effects. Three reads anchor the picture:
- Bifurcated market Surgical, warehouse, and robotaxi segments scale on proven economics today; the humanoid segment is pre-revenue and carries the widest forecast dispersion of any tech sector, roughly a 25x spread between low and high 2035 estimates against a ~$38B consensus.
- Cost is the trigger Humanoid bill-of-materials fell ~40% in a single year; Chinese BOM near $35K (2025) is heading toward ~$17K by 2030, pushing payback toward the 6-month-to-2-year range that ignites imitation-driven adoption.
- Capability, but brittle Vision-language-action models now generalize to unseen homes for the first time, yet still fail frequently; reliability, not raw intelligence, is the bottleneck.
MARKET & ADOPTION · WHERE EMBODIED ROBOTICS SCALES, AND WHEN
| Robot class | Current size | Forecast | CAGR |
|---|---|---|---|
| Humanoid robots | ~$2-3B (2025) | $38B by 2035 (consensus); $8.78B-$251.40B range | 35-45% |
| Warehouse / AMR | $6.5B (2025) | $25.4B by 2034 | ~16.8% |
| Robotaxi services | $0.85-4.2B (2025) | $28.6-67.8B by 2034 | 35-45% |
| Agricultural robots | ~$12-18.6B (2025) | $40-56B by 2030 | 14-26% |
| Industrial (installed) | 4.66M operational (2024) | 700K+ annual installs by 2028 | ~6% |
| Surgical (Intuitive) | 11,106 da Vinci systems (2025) | 13-15% procedure growth / yr | · |
FORM-FACTOR ECONOMICS · SPECIALISTS, SEMI-GENERAL & HUMANOIDS
WHICH ROBOTS BECOME BIG, WHERE, AND WHY
Cost-per-task, not unit price, decides deployments. On flat ground, where most automatable physical labor sits, wheeled and specialized robots hold a decisive edge: bipedal locomotion needs roughly 10 to 50 times more energy per unit distance than wheels, and the reliability gap is larger still. The proven scaling templates, Amazon's million-plus warehouse robots, Waymo's 170M-plus rider-only miles, Intuitive's quarter-century build, all scale by being purpose-built.
| Class | Economic logic | Representative products |
|---|---|---|
| Autonomous systems (purpose-built) | Win where the task is mobility; ROI is labor- or safety-driven | Waymo robotaxi (~$160-175K/vehicle); Aurora / Kodiak trucking; John Deere autonomous tractors |
| Semi-general mobile robots | Win the flat-floor logistics economy on cost and reliability | Amazon AMRs; Boston Dynamics Stretch ($300-500K) and Spot ($74.5K+); Locus AMRs (RaaS $1.5-3.5K/mo) |
| Humanoids (generalist bet) | One amortizable platform; pays off only if a generalist brain and mass-manufacturing crush cost and the reliability gap together | Tesla Optimus ($20-30K target); Figure 02/03 (~$130K to $20K); Unitree G1 ($13.5K+); Apptronik Apollo |
The verdict is a timeline, not a single winner: for the next five to seven years specialists win on cost-per-task wherever the floor is flat and the task is definable, while humanoids win first in human-shaped, hard-to-retrofit, high-wage niches and ride the cost curve down. Reliability, not price, stays the binding constraint the bull cases most underweight.
ROBOTICS-AS-A-SERVICE & VALUE CAPTURE
| Provider / segment | Published rate | Model notes |
|---|---|---|
| Knightscope (security) | ~$6.25-$11 / robot-hour | vs. $25-45/hr loaded human guard |
| Formic (industrial) | $8-$30 / hour | Zero CapEx; ~97% renewal; 400K+ production hours |
| Locus (warehouse AMR) | ~$2,000-$4,000 / robot / month | OTA upgrades and refurbishment included |
| Figure (BMW pilot) | ~$25 / robot-hour (reported) | Secondhand report, not company-confirmed |
| Diligent Moxi (hospitals) | ~$200K-$400K / hospital / yr | 1.25M+ deliveries across 25+ hospitals |
BUSINESS MODELS & GO-TO-MARKET · WHO PULLS ROBOTS OUT OF THE FACTORY
Value bifurcates: software gross margins of 70 to 85% dwarf hardware's 30 to 40%, so the winners are horizontal "brain"-layer players and vertically integrated operators that own the fleet and recurring revenue, not the assemblers, where price is commoditizing fast. Ranked by real deployment, commercialization runs autonomous machinery first, then semi-general mobile robots, then humanoid paid pilots, and last the consumer home.
HARDWARE ECONOMICS · DOES THE SCALING-LAW BET HOLD FOR ATOMS?
THE PHYSICAL LAYER & ITS CHOKEPOINTS
Data and compute scaling genuinely improve robot policies, but hardware obeys experience curves of roughly 11 to 20% per doubling, one to two orders of magnitude shallower than the AI-compute trajectory and bounded by a rare-earth materials floor. Actuators are the cost-and-physics chokepoint, 40 to 56% of humanoid bill-of-materials, with NdFeB magnet supply (China over 90%) the binding constraint, not compute:
| Actuator architecture | Reduction ratio | Efficiency | Shock tolerance | Typical role |
|---|---|---|---|---|
| Harmonic (strain-wave) | 30:1-50:1 | 80-85% | Fragile flexspline | Arms, wrists (precision) |
| Cycloidal | 8:1-12:1 | 85-90% | High (300% peak) | Legs, impact joints |
| Quasi-direct-drive (QDD) | 6:1-15:1 | High | High | Dynamic legs, safe HRI |
The decisive split is horizontal "brains" versus vertical "bodies": China builds the bodies cheapest and ships the most units, which makes manufacturing, not algorithms, the likeliest place a Western thesis fails. That is exactly why the project does not stop at the market model; it descends into the hardware itself.
THE HARDWARE BRANCH · ROBOT-HAND ACTUATION, JUDGED ON COST-PER-TASK
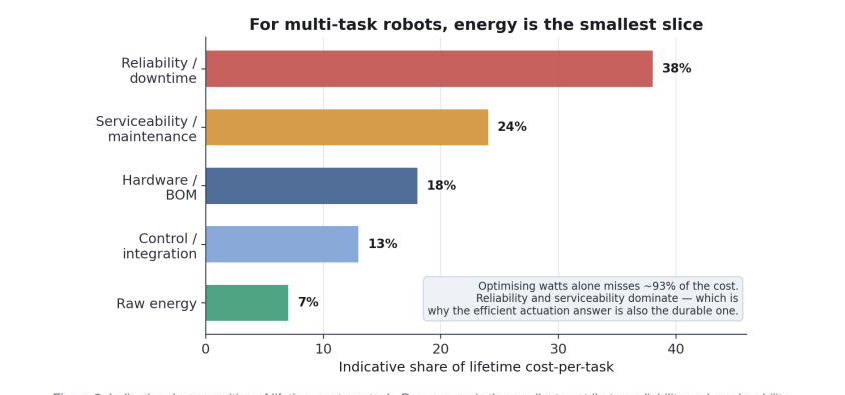
THE METRIC THAT ACTUALLY APPLIES
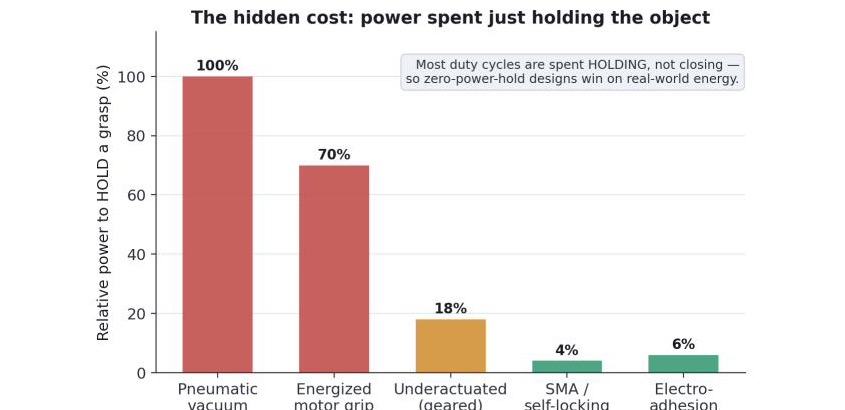
For a multi-task robot, "efficiency" is not watts per grasp, it is cost per successful task over the service life, dominated by how often the hand fails and how expensive it is to service. Reframing the metric this way is what moves the answer away from lightweight tendon hands toward robust, serviceable mechanisms, and it surfaces a hidden lever: because most duty cycles are spent holding in transit, a non-backdrivable self-locking drive that holds grip at zero current is often a bigger real-world saving than the actuator family itself.

RECOMMENDED REFERENCE ARCHITECTURE

THE UNDERACTUATED WRAP · ONE ACTUATOR, ADAPTIVE ENVELOPE
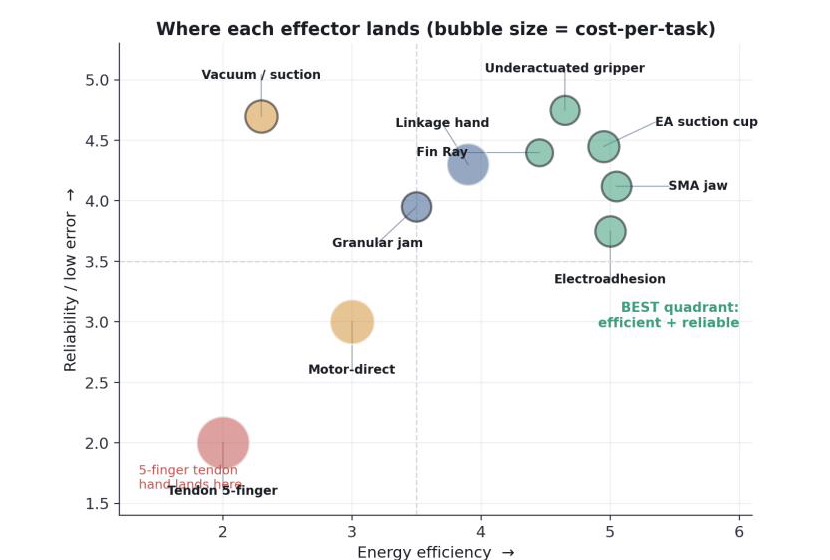
COMPARING EVERY DRIVE METHOD & END-EFFECTOR
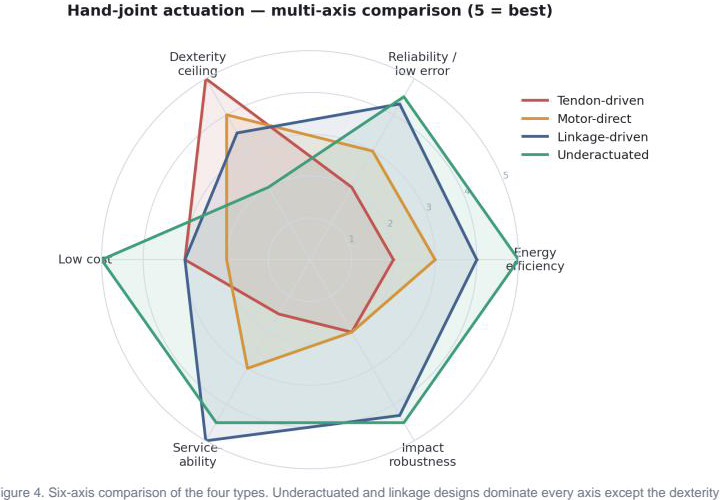
THE FOUR HAND-JOINT ACTUATION TYPES
Weighted for multi-task use (reliability and serviceability, not peak dexterity), underactuated and linkage designs lead every axis except the dexterity ceiling, where tendon drive wins.
| Type | Energy | Reliability | Fit for multi-task use |
|---|---|---|---|
| Tendon-driven | Low-med | Low | Highest dexterity, but creep, wear, and cable breakage. Research-stage. (Shadow Hand, Tesla Optimus) |
| Motor-direct (geared) | Medium | Medium | Intuitive but bulky and thermally limited; high reflected inertia. (Allegro, JHU MPL) |
| Linkage / gear-driven | Good | High | Deterministic, durable, serviceable; the dexterous-when-needed choice. (ILDA, GR-Dexter) |
| Underactuated | Best | Very high | Adaptive grasp, fewest actuators; lowest energy, cost, and failure rate. (Robotiq 3-Finger, Barrett) |
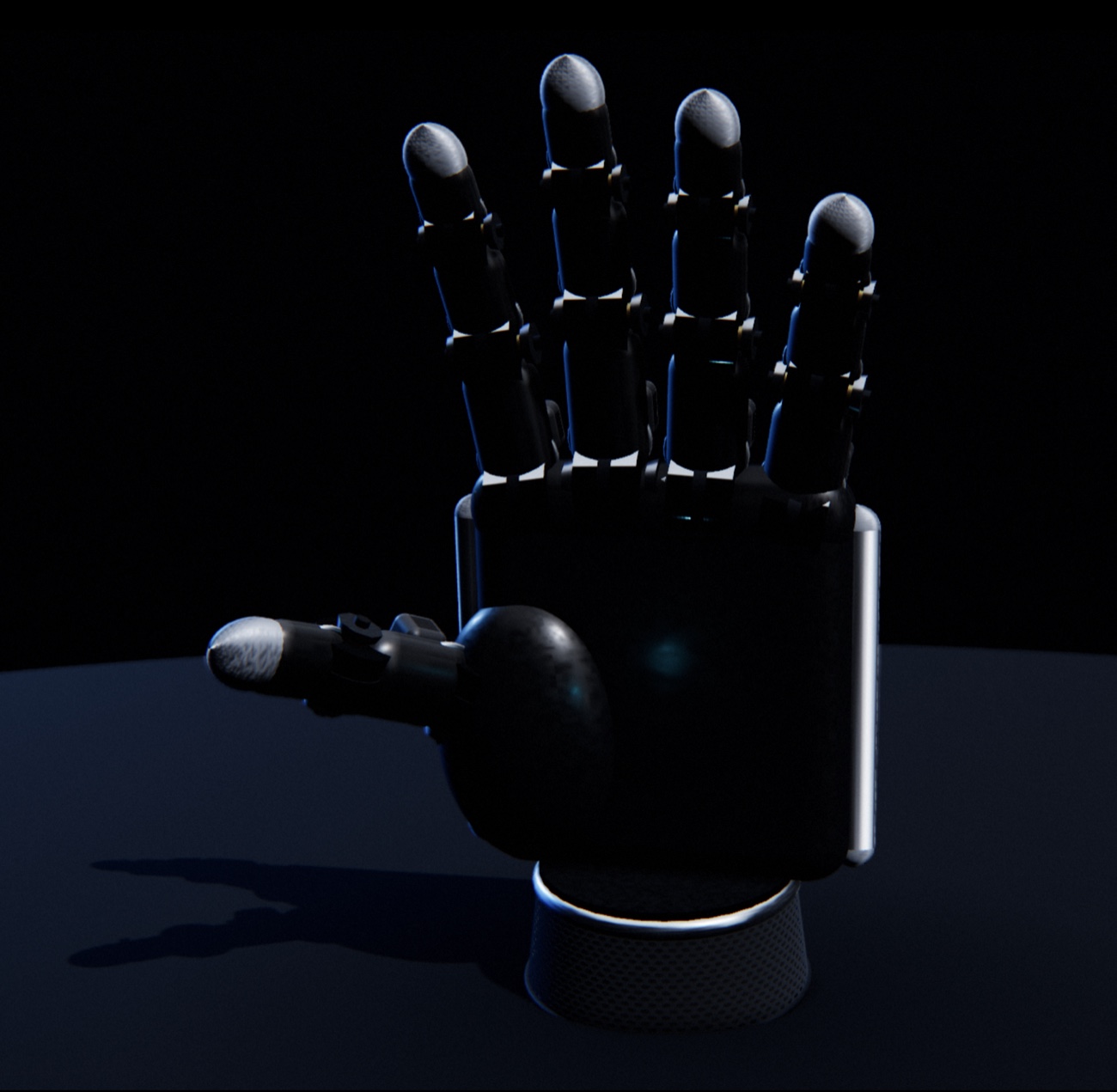
THE CAD DESIGN · FIVE-FINGER HAND ACTUATOR, THREE ANGLES


ACTUATOR BUILDS · THE TEST-BEDS BEHIND THE STUDY
PROJ. 05
The Robotic Pianist


PROJ. 06
Thesio: The Prediction Engine
APP UI · SCREEN BY SCREEN

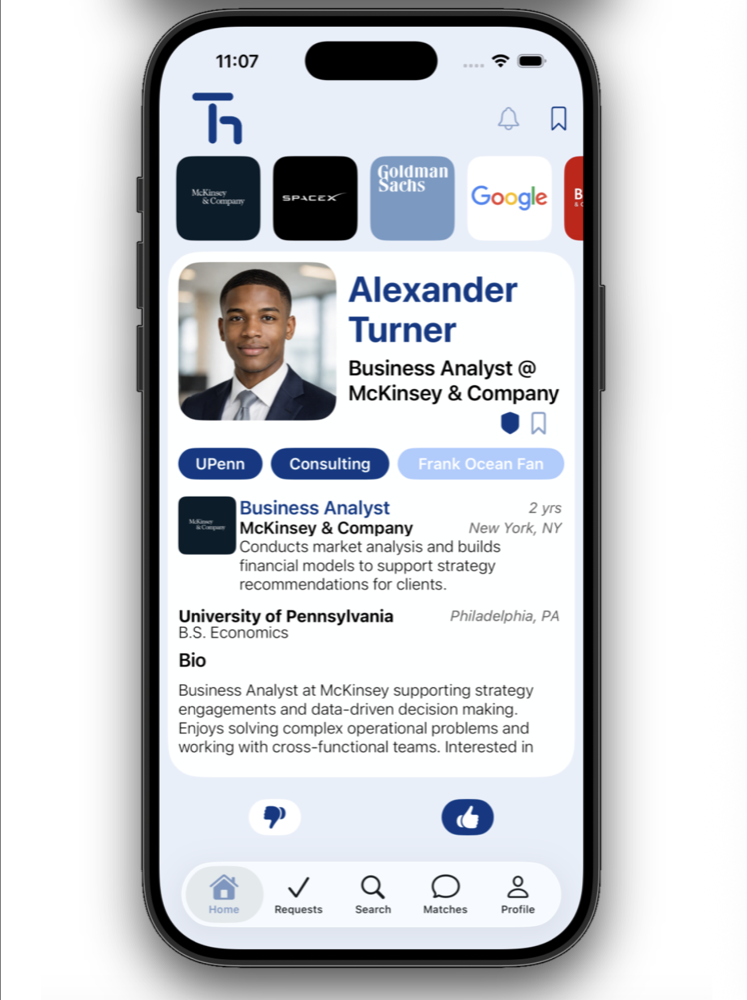
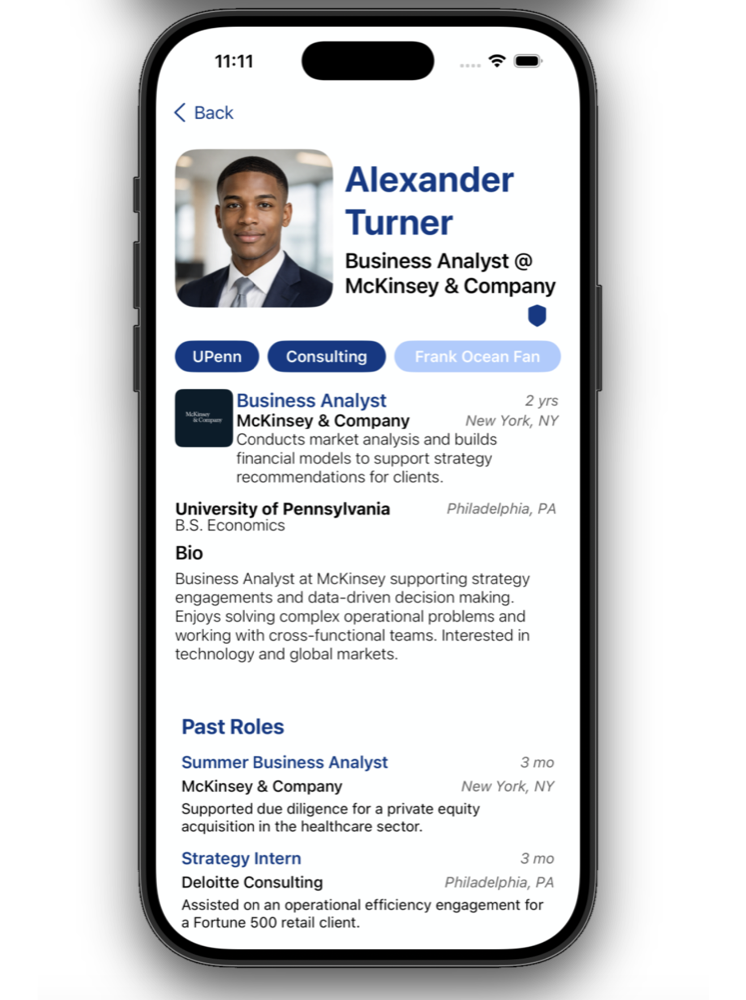
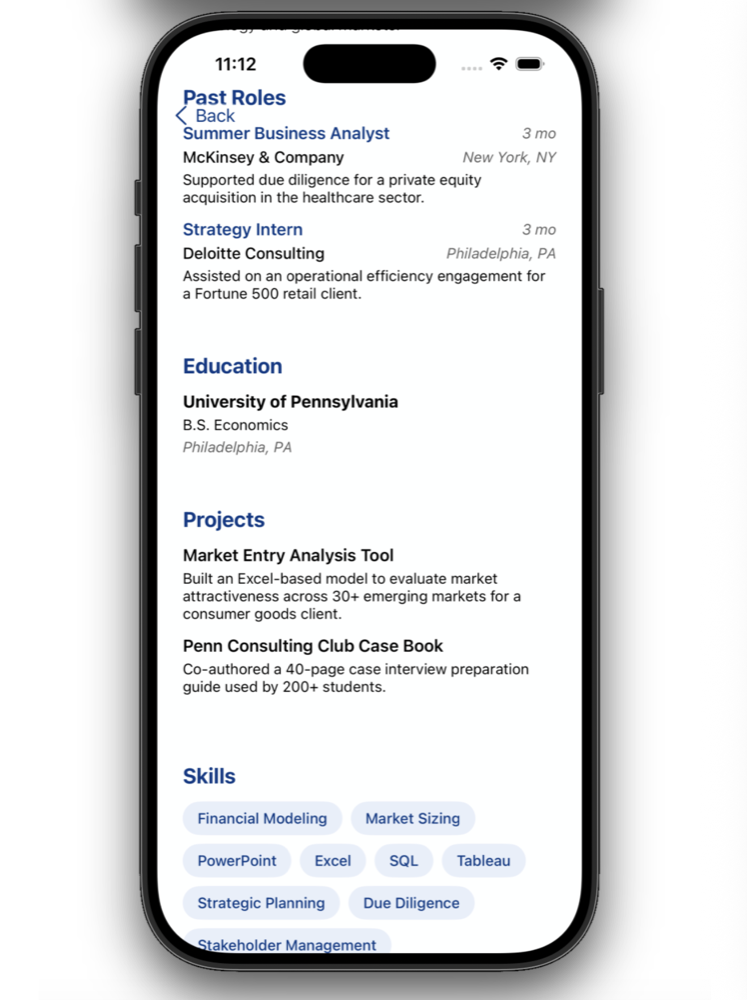

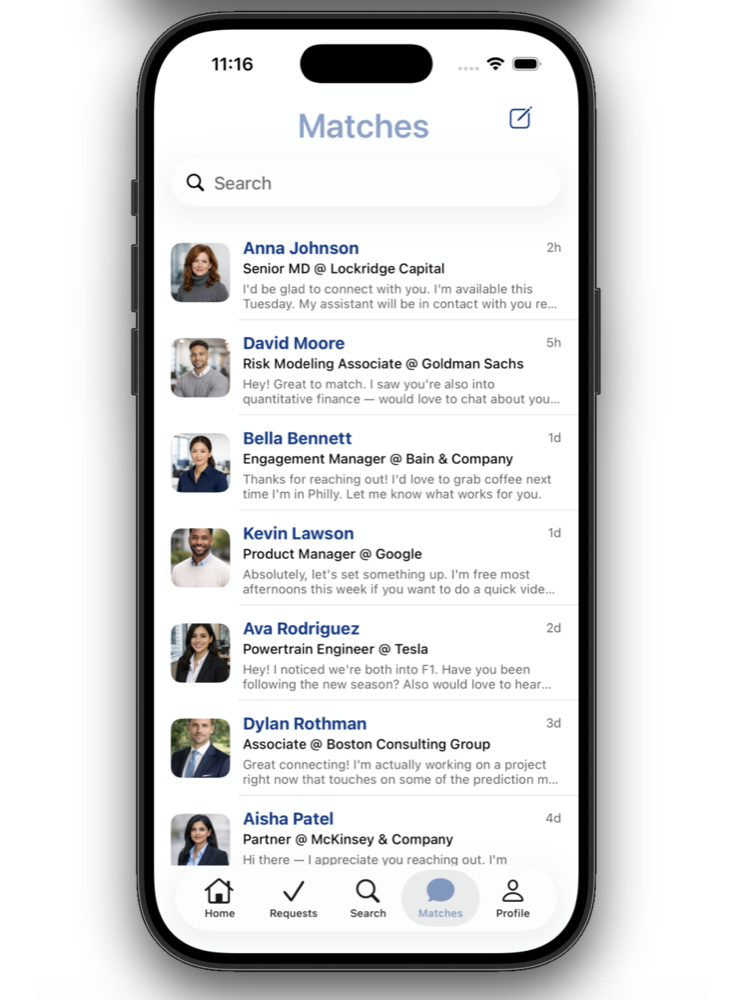
WHAT WE'VE BUILT
Thesio's first deployment is a native iOS application that runs the full networking loop end to end: discovery, matching, evaluation, and connection, with the architecture needed to grow into production.
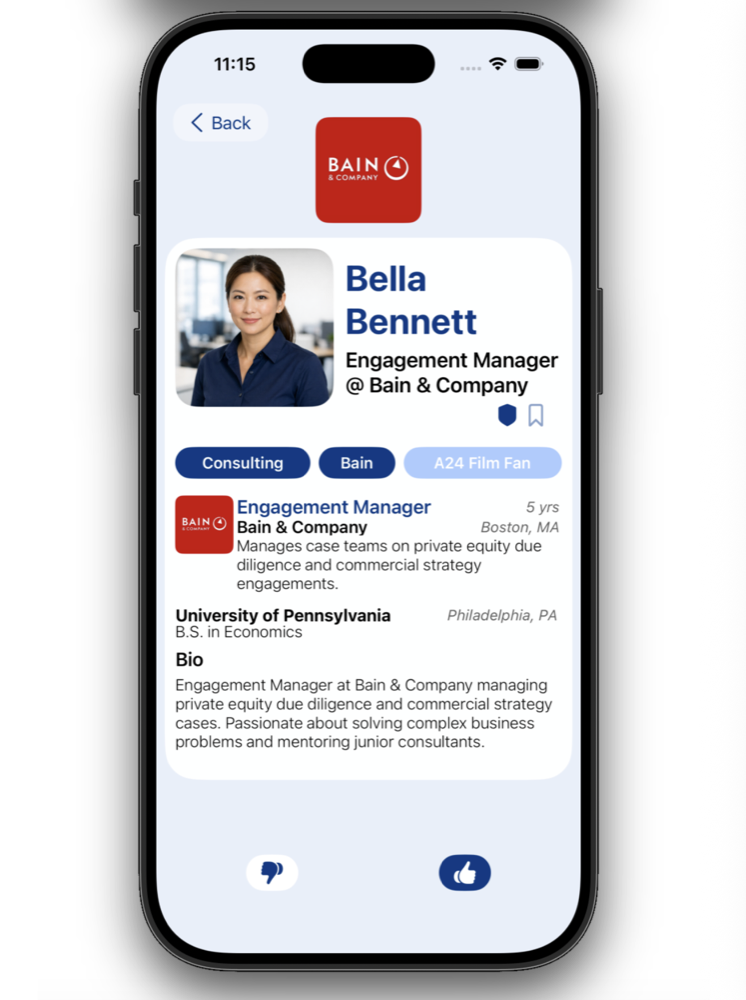
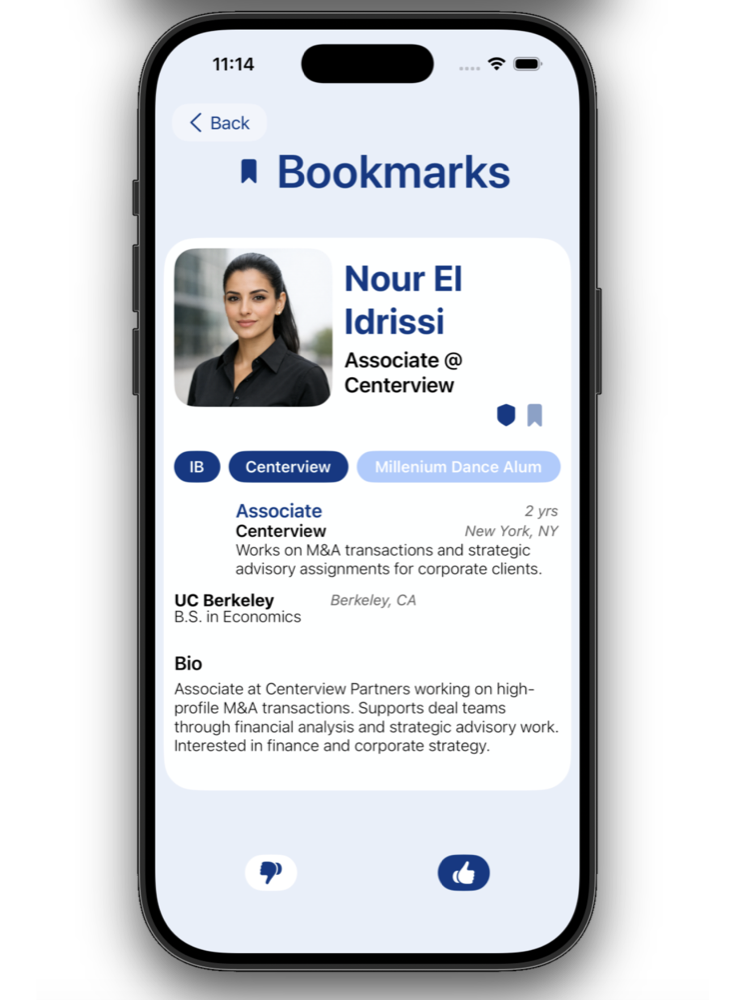
- Swipe discovery A swipeable stack of profile cards to like, pass, bookmark, or defer; a double-tap opens an expanded profile for deeper evaluation.
- Match keys Every card surfaces 3 to 5 predicted reasons the match exists, from industry, role, and trajectory to shared interests and personal hooks.
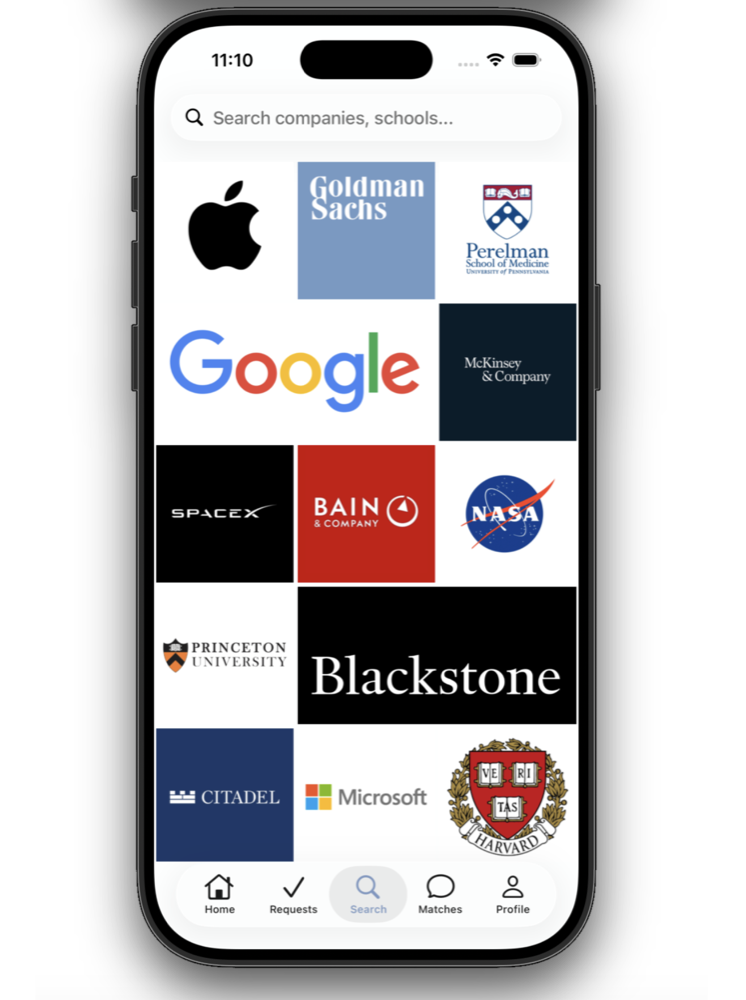
- Targeted search Explore specific companies and industries and swipe through high-fit people inside them, powered by the same engine.
- Requests feed Incoming interest arrives as its own swipeable inbound feed with the same like-and-pass interactions.
- Matched messaging Every conversation begins with a mutual match, eliminating unsolicited outreach by design.
ROADMAP
- V0 Prototype Out now: a fully interactive offline prototype, tested on both sides of the market.
- V1 Alpha Server-mediated backend, real authentication, and an internal build for deeper testing.
- V2 Beta Live with users on both sides of the market.
FULL WALKTHROUGH · DISCOVERY → MATCH → MESSAGE
PROJ. 07
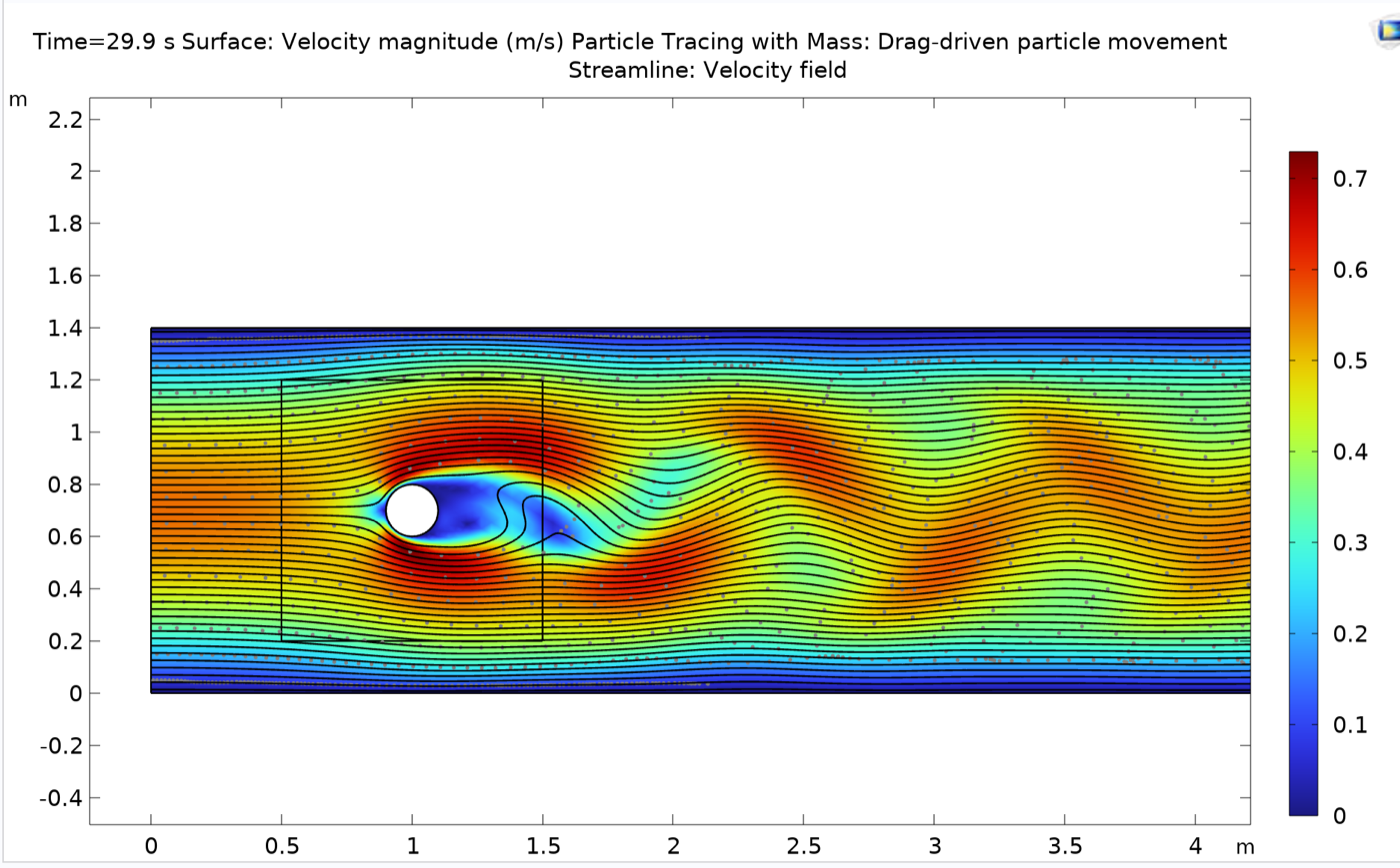
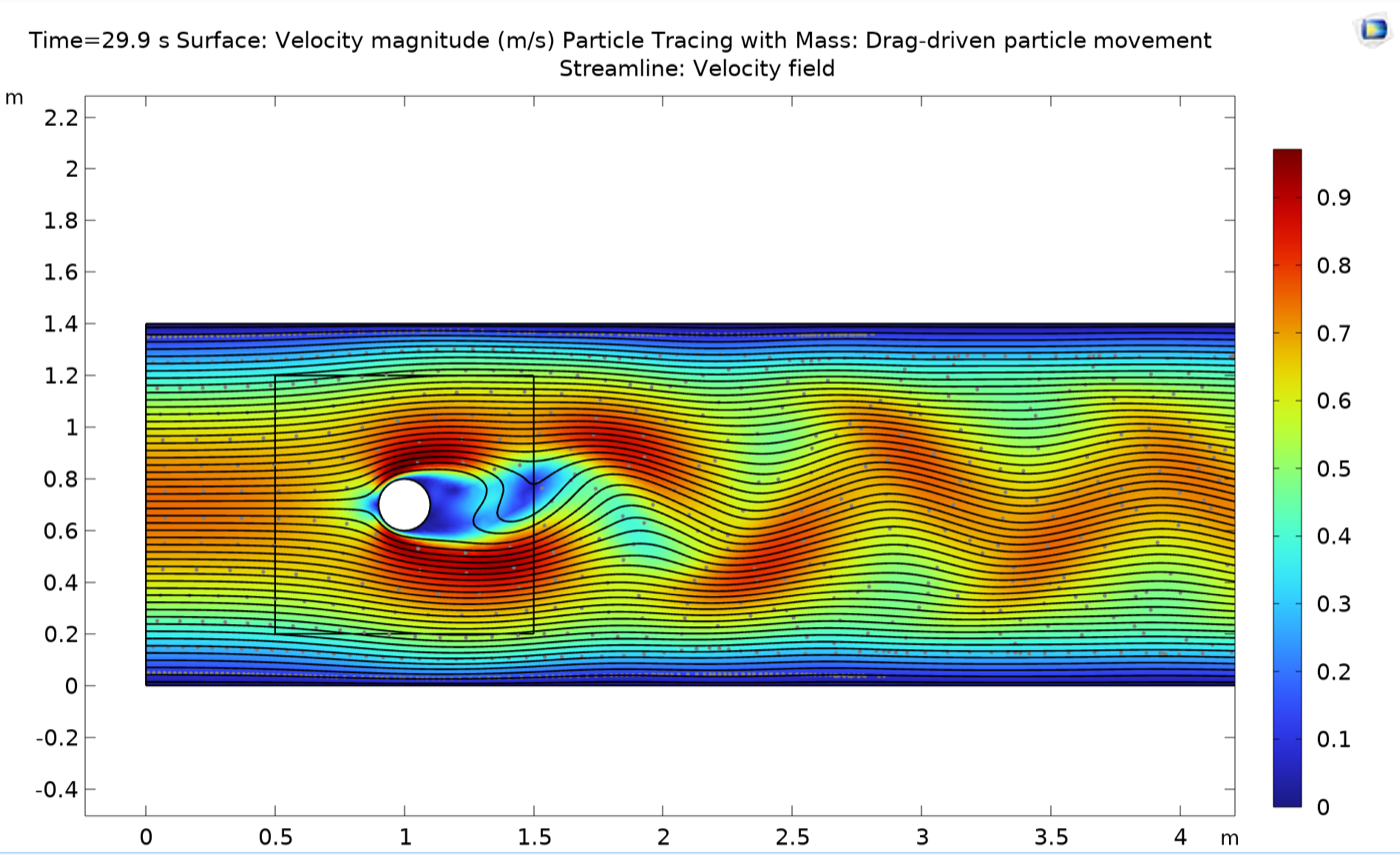
Wake & Drag: Cd–Re Characterization via CFD
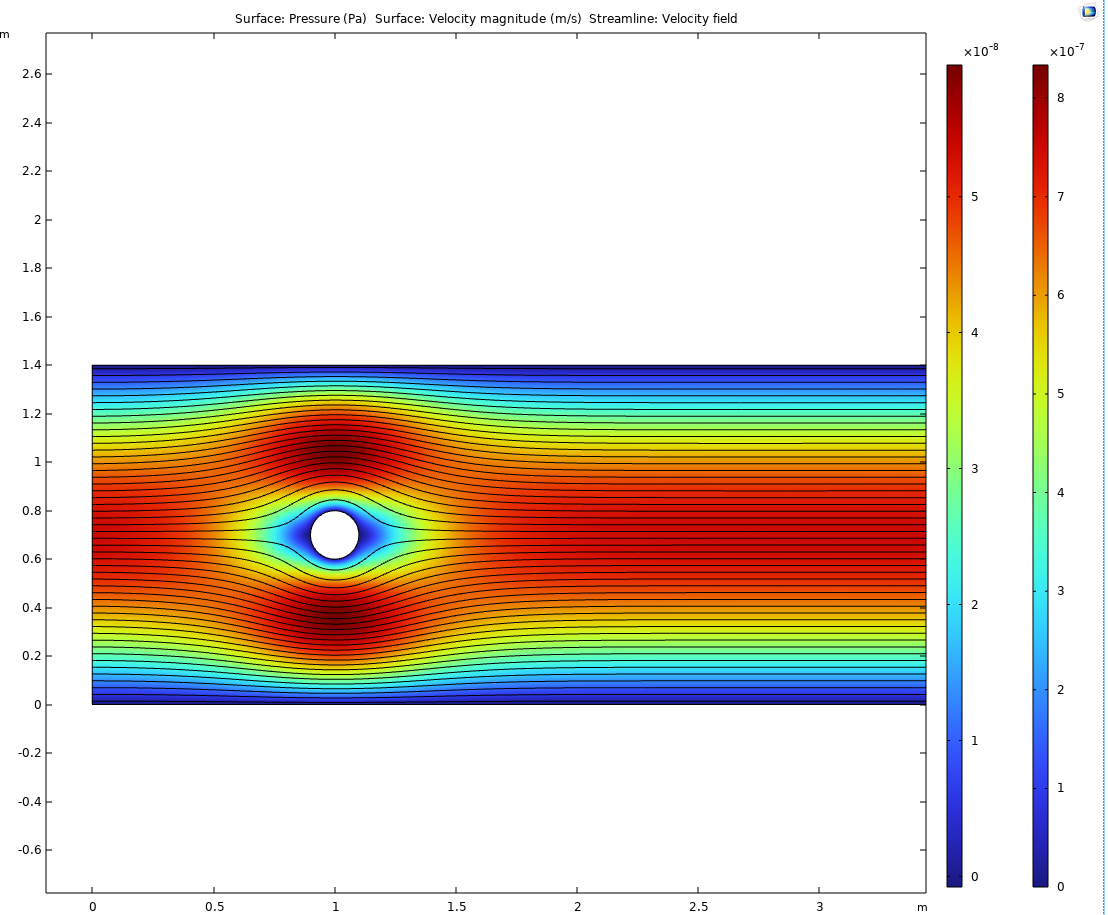
VELOCITY FIELD · Re = 5 · ATTACHED FLOW
MODEL, METHOD & VALIDATION



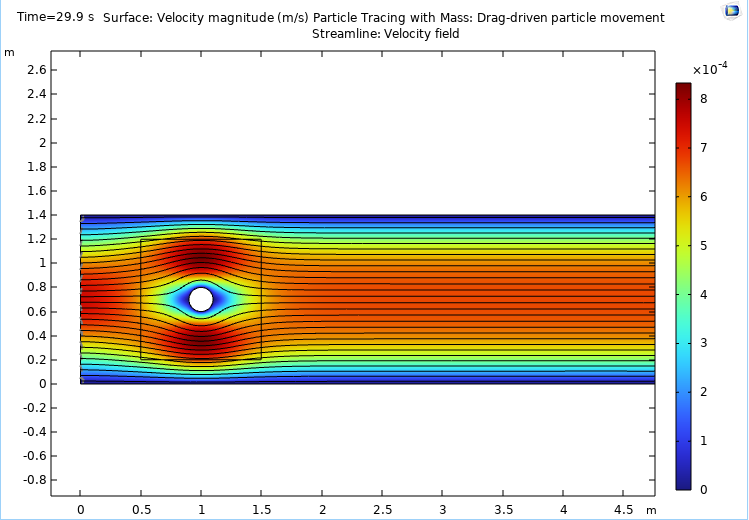
VELOCITY FIELD ACROSS THE REYNOLDS SWEEP · STOKES FLOW TO VORTEX STREET
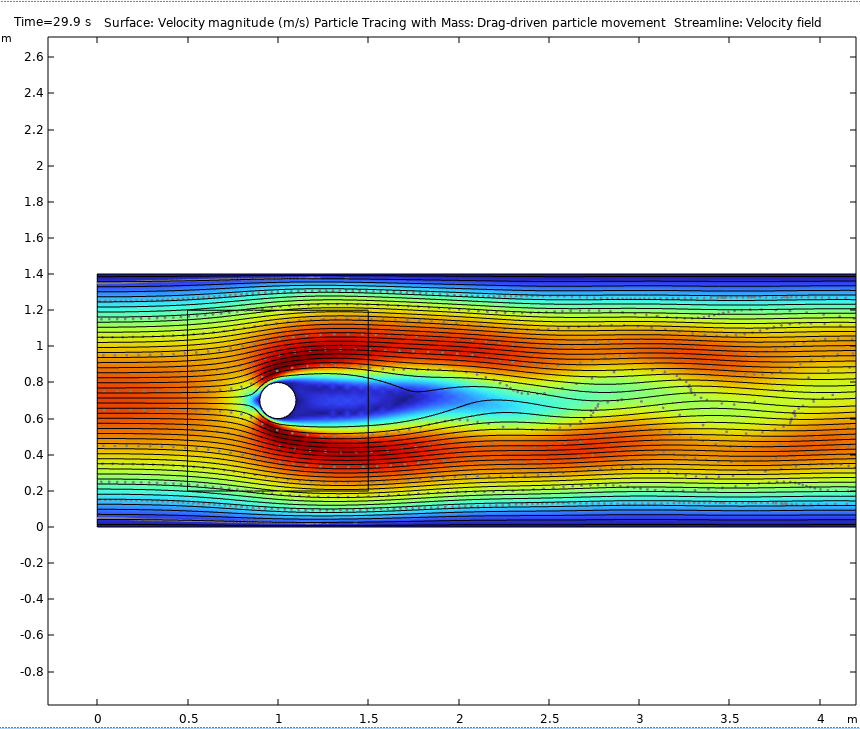
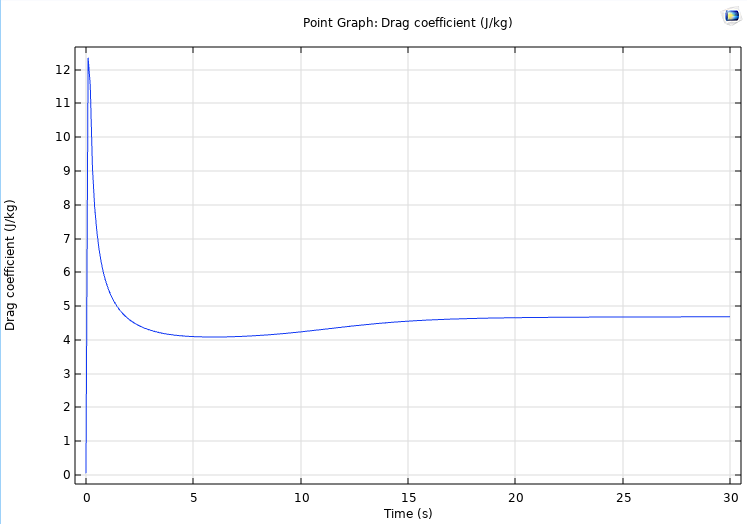
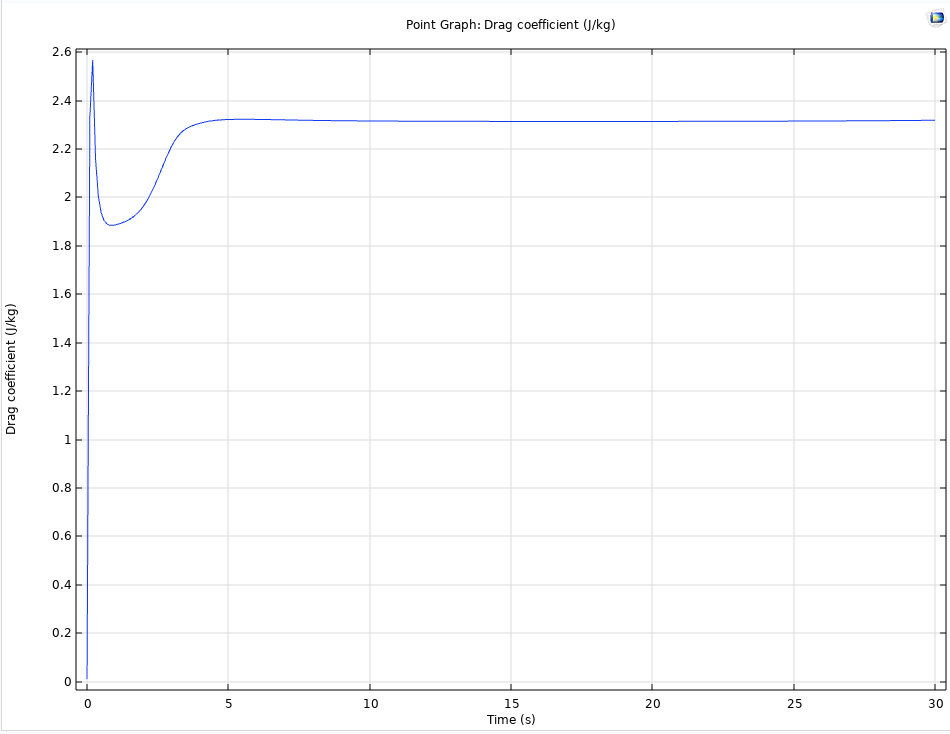
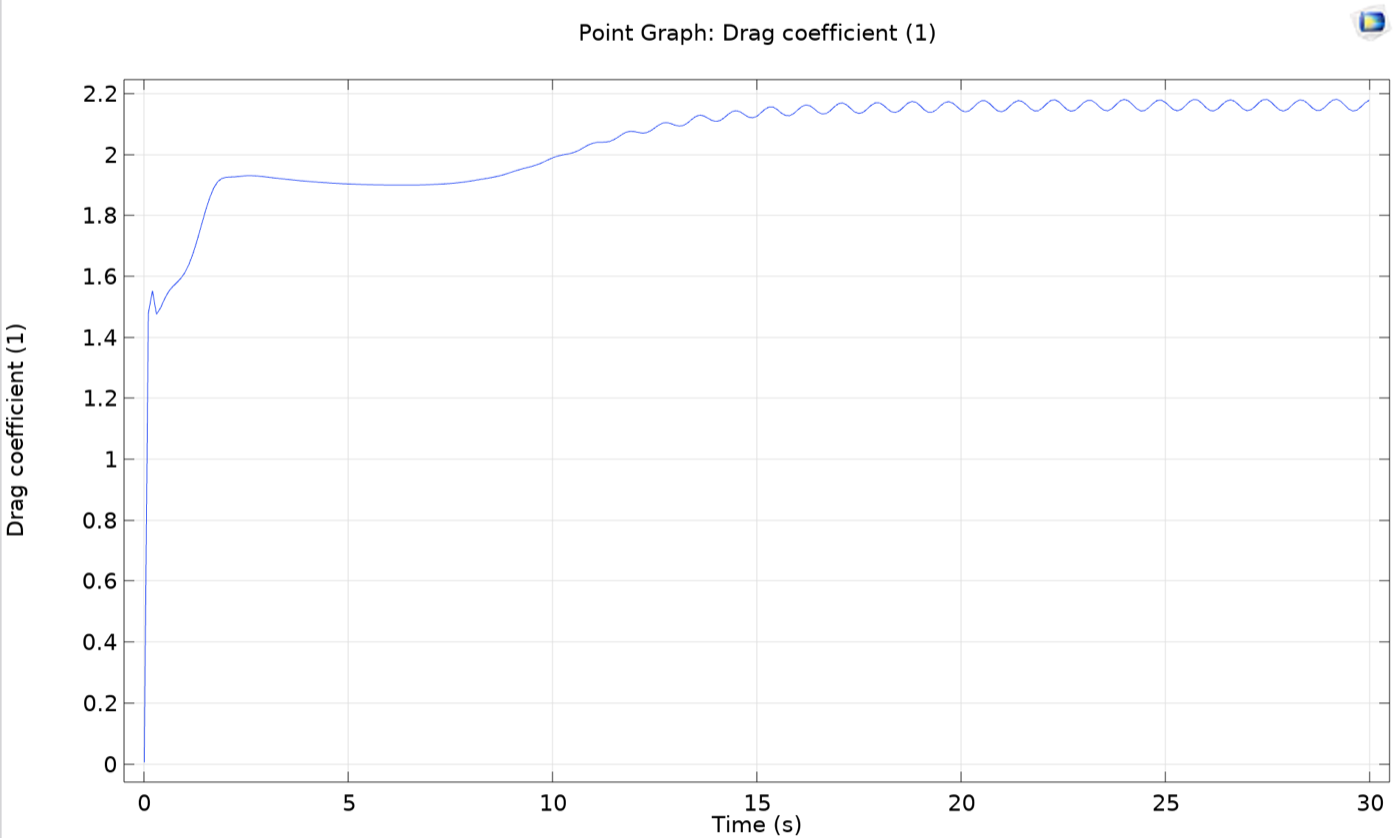
DRAG COEFFICIENT OVER TIME · ONSET OF VORTEX SHEDDING
PROJ. 08
Vertical Axis Wind Turbine
TECHNICAL BREAKDOWN · FROM TUNNEL DATA TO DEMO DAY

TIP-SPEED RATIO
The dimensionless tip-speed ratio relates blade-tip speed to the oncoming wind, and anchors the whole analysis:
$$ \lambda = \frac{\omega R}{V} $$
where $\omega$ is the rotor's angular velocity, $R$ its radius, and $V$ the effective wind speed. Peak performance in the wind-tunnel data landed at $\lambda = 1.23$.

FULL-SCALE ROTOR SIZING
Solving the tip-speed-ratio relation for radius at the design point ($\lambda = 1.23$, $V = 2.6\ \text{m/s}$, $\omega = 2\pi\ \text{rad/s}$) set the full-scale geometry:
$$ R = \frac{\lambda V}{\omega} = \frac{(1.23)(2.6\ \text{m/s})}{2\pi\ \text{rad/s}} = 0.508\ \text{m} = 20\ \text{in} $$
A 20-inch radius, a 40-inch diameter, became the final full-scale turbine size.


POWER, THE BETZ LIMIT & SCALING
Mechanical power follows the standard wind-power relation, with its steep cubic dependence on wind speed:
$$ P = \tfrac{1}{2}\,\rho\, A\, V^{3}\, C_{p} $$
No turbine can exceed the Betz limit, $C_{p,\,\text{Betz}} = 0.593$. The low-resistance trials returned coefficients above it, which I traced to faulty Arduino voltage readings and excluded, keeping only the clean $20\ \Omega$ data. Using the peak $C_p = 0.502$ projected the scaled output:
$$ P_{\text{mech}} = \tfrac{1}{2}\,\rho\, A\, V^{3}\, C_{p} = 4.38\ \text{W} \qquad P_{\text{elec}} = \eta_{\text{gen}}\,P_{\text{mech}} = (0.80)(4.38\ \text{W}) = 3.5\ \text{W} $$

FULL-SCALE BUILD
The 40-inch rotor was laser-cut from MDF ribs connected by dowels and skinned with a heat-gun-formed wrap. Interlocking hub plates let the diameter grow beyond the laser cutter's bed, and a 1:4 gearbox stepped the slow, high-torque rotor up into the generator's useful speed range.

DEMO-DAY RESULTS
On demo day the turbine self-started cleanly and held steady rotation; the measured numbers came out as:
$$ P = \frac{V^{2}}{R} = \frac{(3.45\ \text{V})^{2}}{8\ \Omega} \approx 1.49\ \text{W} $$
$$ \omega = \frac{2\pi}{T} = \frac{2\pi}{1.1\ \text{s}} \approx 5.71\ \text{rad/s} \qquad V = \frac{d}{t} = \frac{12.7\ \text{m}}{2.24\ \text{s}} \approx 5.7\ \text{m/s} $$
The measured $1.49\ \text{W}$ fell short of the $3.5\ \text{W}$ prediction, and that gap was the most useful result: turbulent hallway airflow and a tape-heavy blade skin explained the shortfall and pointed straight at a rigid, single-piece blade as the next iteration.
PROJ. 09
Hydrostatic Thrust Tower
WHAT WE WORKED ON





PROJ. 10
Water-Butane Rocket

REDESIGNED ROCKET · CAD RENDER
DESIGN, MODEL & DEMO DAY

EXTERNAL SKELETON · CAD OVER THE BOTTLE

OPENROCKET · CG AHEAD OF CP

OPTIMIZED TRAJECTORY · LAUNCH → GAP → LANDING
SEC. B / FURTHER WORK
Across disciplines
Electrical, mechanical CAD, and software: projects that show how readily the work moves between domains.

 WELCOME · MEET HUEY
WELCOME · MEET HUEY
SCREENS · FROM LAUNCH TO GAMEPLAY



SEC. C / COURSEWORK
Coursework
BY SEMESTER · SPRING 2026 – FALL 2023
Spring 2026
- MEAM 3480 Mechanical Engineering Design Laboratory
- MEAM 3210 Dynamic Systems and Control
- MEAM 4150 / OIDD 4150 / IPD 5150 Product Design
- PHYS 2260 Computational Physics
- MEAM 5430 Performance, Stability and Control of UAVs (Masters Level)
- FNAR 3230 Paradigms & Practices
Fall 2025
- MEAM 3470 Mechanical Engineering Design Laboratory
- EAS 5450 Engineering Entrepreneurship I
- ENGR 1050 Applied Computing
- MEAM 3200 Mechanical and Mechatronic Systems
- MEAM 3450 Mechanics of Solids
Summer 2025
- MATH 3120 Linear Algebra (Mathematics Elective)
Spring 2025
- MEAM 2030 Thermodynamics I
- MEAM 2110 Engineering Mechanics: Dynamics
- MEAM 2480 Mechanical Engineering Laboratory 2
- MATH 2410 Calculus, Part IV
- EAS 2030 Engineering Ethics
Fall 2024
- MEAM 2020 Thermal and Fluids Engineering
- MEAM 2010 Statics & Strengths of Materials
- MEAM 2470 Mechanical Engineering Laboratory 1
- MATH 2400 Calculus, Part III
- MEAM 2010 Machine Design & Manufacturing
Spring 2024
- ESE 1120 Electromagnetics
- THAR 1020 Intro to Acting
- MATH 1410 Calculus, Part II
- MEAM 1010 Introduction to Mechanical Design
Fall 2023
- MEAM 1100 Introduction to Mechanics
- MEAM 1470 Introduction to Mechanics Lab
- MATH 1400 Calculus, Part I
- CHEM 1012 General Chemistry I
- WRIT 0730 The Ethics of Artificial Intelligence

SEC. D / ABOUT
About
I'm a rising senior at the University of Pennsylvania pursuing a Bachelor of Science in Mechanical Engineering with a concentration in Dynamics, Controls, and Robotics and minors in Engineering Entrepreneurship and Mathematics. I'm passionate about the intersection of robotics, embodied intelligence, and product design, and I'm especially interested in how purpose-built physical AI systems move from prototype to real-world deployment. Alongside my engineering work, I'm drawn to entrepreneurship and the process of turning technical insight into products people actually use. I'm eager to build, learn, and contribute to ambitious projects at the frontier of robotics and intelligent hardware.
SPEC SHEET — D. IKE
- EDU
- B.S.E. Mechanical Engineering — University of Pennsylvania
- CONC
- Dynamics, Controls & Robotics
- MINOR
- Engineering Entrepreneurship · Mathematics
- DESIGN
- CAD · Solid modeling · Engineering drawings · Exploded assemblies
- MAKE
- CNC milling · Lathe work · Laser cutting · Hands-on fabrication
- ANALYZE
- FEA · Thermal simulation · Brake & systems calculations
- SYSTEMS
- Control systems · Electromechanical integration · Circuit design
- SOFTWARE
- Swift app development · Prototyping
Contact
Open to roles and collaborations in product design, robotics, and mechanical engineering.
